16/07/2023
¿Alguna vez has soñado con controlar complejos mecanismos con la simple pulsación de un botón? Imagina una maqueta de trenes a escala, donde cada aguja cambia de vía con solo tocar un número en un panel de control. O quizás, la apertura y cierre de válvulas en un sistema de riego, o incluso las articulaciones de un pequeño robot. La clave para lograr esta precisión reside en los servomotores, dispositivos capaces de posicionarse con una exactitud asombrosa, y el control sobre ellos se vuelve sorprendentemente sencillo cuando lo combinamos con un teclado matricial y una plataforma como Arduino.
Aunque la idea de controlar varios servomotores mediante un teclado pueda parecer muy específica, sus aplicaciones son tan variadas como tu imaginación lo permita. Este artículo te guiará a través de los fundamentos, desde la identificación de los servomotores hasta la lógica de programación necesaria para construir un sistema de control robusto y eficaz.
- ¿Qué son los Servomotores y Cómo Funcionan?
- Identificación y Cableado de un Servomotor
- El Desafío del Control Múltiple con un Teclado Matricial
- Componentes Clave para Nuestro Sistema de Control
- Principios de Funcionamiento del Sistema
- La Magia detrás del Código: Librerías y Lógica de Programación
- Tabla Comparativa: Tipos Comunes de Servomotores
- Preguntas Frecuentes (FAQ)
- ¿Puedo controlar más de un servomotor con este mismo código y teclado?
- ¿Qué pasa si mi servomotor no se mueve o vibra?
- ¿Cómo puedo ajustar los grados de movimiento de mi servomotor?
- ¿Necesito una fuente de alimentación externa para un solo servomotor?
- ¿Qué otros tipos de entradas puedo usar además de un teclado matricial?
- Conclusión
¿Qué son los Servomotores y Cómo Funcionan?
Los servomotores son dispositivos electromecánicos que ofrecen un control de posición angular muy preciso. A diferencia de un motor de corriente continua (DC) que gira continuamente, un servomotor puede girar a una posición específica y mantenerla. Esto se logra mediante una combinación de un motor DC, un reductor de engranajes, un potenciómetro (que detecta la posición actual del eje) y un circuito de control.
El corazón del control de un servomotor es la señal de Modulación por Ancho de Pulso (PWM). Esta señal, generada por un microcontrolador como Arduino, es una serie de pulsos eléctricos. La duración de cada pulso, o su 'ancho', determina la posición angular a la que el servomotor debe moverse. Por ejemplo, un pulso de 1.5 milisegundos podría indicar la posición central (90 grados), mientras que pulsos más cortos o más largos moverán el servomotor hacia sus límites (0 o 180 grados, típicamente).
La precisión de los servomotores los hace ideales para aplicaciones donde se requiere un movimiento exacto y repetible, como la robótica, el modelismo RC (radio control), y, por supuesto, el control de cambios de vía en maquetas de trenes.
Identificación y Cableado de un Servomotor
La pregunta clave es: ¿cómo se identifican los servomotores? La identificación puede ser de dos tipos: física y lógica. Físicamente, un servomotor se identifica por su tamaño, modelo y, crucialmente, por los colores de sus cables, que indican su función de conexión. Lógicamente, en un sistema con múltiples servomotores, los identificamos por el pin de Arduino al que están conectados o por el nombre que les asignamos en nuestro código (por ejemplo, 'servo1', 'servo2', etc.).
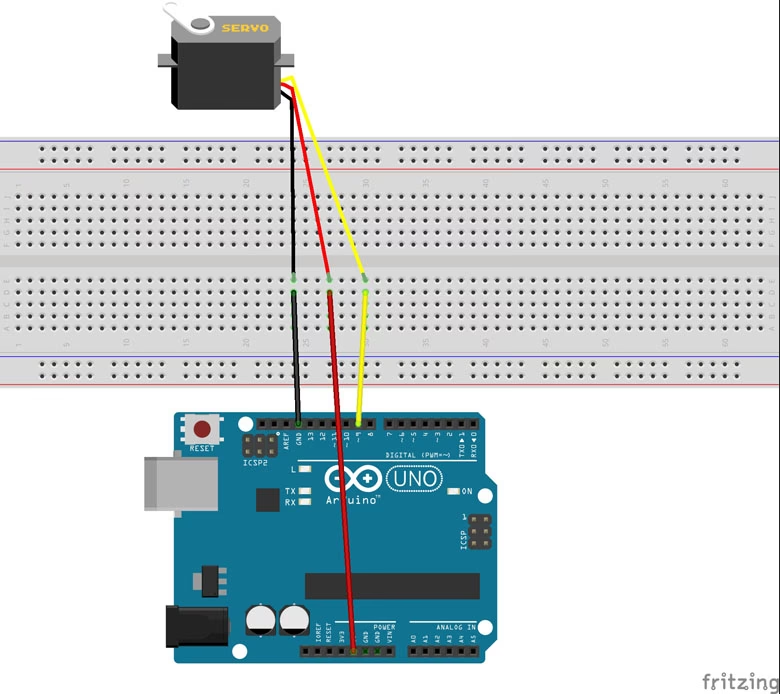
Todos los servomotores, independientemente de su fabricante o tamaño, suelen tener tres cables para su conexión. Estos cables son esenciales para alimentarlos y enviarles la señal de control. Aunque los colores pueden variar ligeramente entre fabricantes, los esquemas más comunes son:
- Rojo-Negro-Amarillo:
- Rojo: Generalmente Vcc (alimentación positiva, +5V).
- Negro: Generalmente GND (tierra, alimentación negativa).
- Amarillo: Cable de Señal (donde se envía la señal PWM desde Arduino).
- Rojo-Negro-Blanco:
- Rojo: Vcc (+5V).
- Negro: GND.
- Blanco: Señal.
- Rojo-Marrón-Naranja:
- Rojo: Vcc (+5V).
- Marrón: GND.
- Naranja: Señal.
Es fundamental conectar estos cables correctamente a tu microcontrolador o fuente de alimentación para evitar daños al servomotor o al propio Arduino. El cable de señal es el que recibe el pulso PWM que le indica al servomotor a qué ángulo debe moverse.
El Desafío del Control Múltiple con un Teclado Matricial
Imagina que tienes varios servomotores, cada uno controlando una función específica, por ejemplo, los cambios de aguja de una maqueta de trenes. Necesitas una forma intuitiva y compacta de seleccionar qué servomotor mover y a qué posición. Aquí es donde entra en juego el teclado matricial.
Un teclado matricial es una matriz de botones organizada en filas y columnas. Al pulsar una tecla, se establece una conexión entre una fila y una columna específicas, permitiendo que el microcontrolador detecte qué botón ha sido presionado con un número reducido de pines. Esto es ideal para sistemas donde necesitas muchas entradas sin usar un pin de Arduino por cada botón.
El escenario que planteamos es sencillo: queremos mover el servomotor número 1 (que podría ser la aguja 1 de nuestra maqueta) entre dos posiciones predefinidas, por ejemplo, 0 y 20 grados. Para ello, el usuario pulsaría la tecla '1' en el teclado matricial y, para confirmar la acción, una tecla designada como 'A'. Si el servomotor está en 0 grados, se moverá a 20; si está en 20, volverá a 0. Este sistema de 'toggle' o alternancia es muy práctico para aplicaciones de encendido/apagado o cambio de estado.
Más allá de las maquetas de trenes, esta lógica puede extenderse a:
- Control de válvulas en sistemas de riego automatizados.
- Apertura y cierre de compuertas o puertas pequeñas.
- Movimiento de elementos en displays interactivos o prototipos de robótica.
- Selección de funciones en paneles de control industriales sencillos.
La versatilidad de este enfoque lo convierte en una herramienta valiosa para cualquier proyecto de automatización.
Componentes Clave para Nuestro Sistema de Control
Para construir este sistema, necesitarás algunos componentes básicos de electrónica:
- Arduino (o compatible): Es el cerebro de nuestro sistema. Se encargará de leer las pulsaciones del teclado y generar las señales PWM para los servomotores. Cualquier placa Arduino (Uno, Nano, Mega) servirá.
- Servomotor(es): Los actuadores que realizarán el movimiento físico. Puedes empezar con uno y luego expandir el sistema a varios.
- Teclado Matricial (ej. 4x4): La interfaz de entrada para el usuario.
- Cables Jumper: Para realizar las conexiones entre los componentes.
- Protoboard (opcional pero recomendado): Para organizar las conexiones de forma temporal y segura.
- Fuente de Alimentación Externa (recomendado para múltiples servos): Los servomotores, especialmente los más grandes, pueden consumir una corriente significativa. Alimentar varios directamente desde el pin de 5V de Arduino puede sobrecargarlo. Es mejor usar una fuente de alimentación externa para los servos, conectando solo la señal y la tierra común a Arduino.
Principios de Funcionamiento del Sistema
El funcionamiento general del sistema se puede desglosar en los siguientes pasos:
- Inicialización: Al encender el sistema, Arduino configura sus pines, inicializa el teclado matricial y 'engancha' (attaches) los servomotores a los pines designados.
- Lectura Continua: Arduino entra en un bucle (`loop()`) donde constantemente 'escucha' si se ha pulsado alguna tecla en el teclado matricial.
- Identificación de la Tecla: Cuando se detecta una pulsación, el programa identifica qué tecla específica fue presionada (por ejemplo, '1', '2', 'A', etc.).
- Lógica de Control:
- Si la tecla pulsada es un número (por ejemplo, '1'), el sistema sabe que el usuario quiere controlar el servomotor asociado a ese número.
- Luego, el sistema espera una tecla de confirmación (por ejemplo, 'A'). Esto evita movimientos accidentales y asegura que la acción sea intencional.
- Una vez confirmada la acción, el programa verifica la posición actual del servomotor seleccionado.
- Basándose en la posición actual, el programa envía una nueva señal PWM al servomotor para moverlo a su posición alternativa (por ejemplo, de 0 a 20 grados, o de 20 a 0 grados).
- Retraso y Estabilidad: Se introduce un pequeño retraso (`delay()`) después de cada movimiento para permitir que el servomotor complete su acción y para evitar lecturas erróneas o rebotes de las teclas.
La Magia detrás del Código: Librerías y Lógica de Programación
Para simplificar el proceso de programación, utilizaremos dos librerías esenciales en el entorno de Arduino:
- Librería
Servo.h: Esta librería es un estándar para controlar servomotores. Simplifica enormemente el envío de las señales PWM. Con funciones comoservo.attach(pin), le indicas a Arduino a qué pin está conectado el servomotor, y conservo.write(angulo), le dices al servomotor a qué ángulo exacto debe moverse (normalmente entre 0 y 180 grados). - Librería
Keypad.h: Esta librería es fantástica para interactuar con teclados matriciales. Se encarga de toda la compleja lógica de escaneo de filas y columnas, permitiéndote simplemente preguntar al teclado '¿Qué tecla se ha pulsado?' (keypad.getKey()) y obtener el carácter correspondiente. Para configurarla, defines el mapa de tu teclado (makeKeymap), los pines de las filas y columnas, y el número de filas y columnas.
El núcleo del programa residirá en la función loop(), que se ejecuta repetidamente. Dentro de ella, se leerá constantemente la tecla pulsada. Si, por ejemplo, se pulsa la tecla '1', el código entrará en un bloque condicional (`if`). Dentro de este bloque, se implementará un bucle (`do...while`) para esperar la tecla de confirmación 'A'. Una vez que 'A' sea pulsada, se verificará la variable que guarda la posición actual del servomotor. Si está en 0 grados, se le ordenará moverse a 20 grados y la variable de posición se actualizará a 20. Si está en 20 grados, se le ordenará moverse a 0 y la variable se actualizará a 0. Este patrón de alternancia es muy útil para controlar dispositivos que tienen dos estados principales.
La gestión del estado actual de cada servomotor es crucial para que la lógica de alternancia funcione correctamente. Necesitarás una variable (como `posicion` en el ejemplo) por cada servomotor que desees controlar de esta manera.
Tabla Comparativa: Tipos Comunes de Servomotores
| Característica | Servomotor Estándar (SG90, MG996R) | Micro Servomotor (SG90) | Servomotor de Rotación Continua |
|---|---|---|---|
| Tamaño Típico | Mediano a Grande | Muy Pequeño | Mediano a Grande |
| Par (Torque) | Alto a Muy Alto | Bajo | Variable, pero enfocado en velocidad |
| Precisión Posicional | Alta (0-180° o 0-270°) | Alta (0-180°) | No posicional (controla velocidad y dirección) |
| Usos Comunes | Robótica, RC (aviones, coches), automatización, brazos robóticos | Drones, pequeños robots, modelismo, proyectos compactos | Ruedas de robots móviles, cabrestantes, ventiladores |
| Precio | Medio a Alto | Bajo | Medio |
Preguntas Frecuentes (FAQ)
¿Puedo controlar más de un servomotor con este mismo código y teclado?
¡Absolutamente! El código proporcionado en la información es una base excelente. Para controlar múltiples servomotores, necesitarías declarar más objetos Servo (ej. Servo servo2; Servo servo3;), asignarles pines diferentes con attach(), y extender la lógica en la función loop() con más bloques if (key == '2'), if (key == '3'), etc., cada uno con su propia variable de posición y lógica de confirmación.
¿Qué pasa si mi servomotor no se mueve o vibra?
Esto puede deberse a varias razones:
- Cableado incorrecto: Revisa que los cables (Vcc, GND, Señal) estén conectados a los pines correctos de Arduino y que la polaridad sea la adecuada.
- Falta de alimentación: Los servomotores requieren corriente. Si usas muchos o muy potentes, el pin de 5V de Arduino puede no ser suficiente. Conecta una fuente de alimentación externa a los servomotores, asegurándote de que el GND de la fuente externa esté conectado al GND de Arduino.
- Código incorrecto: Asegúrate de que el pin al que está 'enganchado' el servomotor en el código (
servo.attach(pin)) coincida con el pin físico. Verifica los ángulos que estás enviando (servo.write(angulo)) y que estén dentro del rango de tu servomotor (típicamente 0-180 grados). - Problemas con la señal PWM: A veces, otros procesos en Arduino pueden interferir con la señal PWM. Asegúrate de que tu código no esté bloqueando demasiado tiempo o usando interrupciones que afecten la temporización.
¿Cómo puedo ajustar los grados de movimiento de mi servomotor?
Simplemente cambia el valor numérico dentro de la función servo.write(angulo). Por ejemplo, servo1.write(90) moverá el servomotor a 90 grados. Experimenta con diferentes valores para encontrar los ángulos exactos que necesitas para tu aplicación. Recuerda que no todos los servomotores tienen un rango de 0 a 180 grados exactos; algunos pueden tener un rango ligeramente menor.
¿Necesito una fuente de alimentación externa para un solo servomotor?
Para un micro servomotor pequeño como un SG90, el pin de 5V de Arduino suele ser suficiente. Sin embargo, para servomotores más grandes (como un MG996R) o si planeas usar múltiples servomotores, es altamente recomendable usar una fuente de alimentación externa dedicada para los servomotores. Esto evita sobrecargar el regulador de voltaje de Arduino y garantiza un rendimiento estable para tus actuadores.
¿Qué otros tipos de entradas puedo usar además de un teclado matricial?
Puedes usar botones individuales, joysticks, potenciómetros, sensores de distancia, o incluso módulos Bluetooth/Wi-Fi para controlar los servomotores. El teclado matricial es excelente para la selección discreta de múltiples opciones, pero la elección de la entrada dependerá de la interactividad deseada en tu proyecto.
Conclusión
El control de servomotores con un teclado matricial es un excelente proyecto para adentrarse en el mundo de la electrónica y la programación de microcontroladores. Hemos visto cómo la identificación de los servomotores por sus cables y su asignación lógica en el código es el primer paso. Luego, la combinación de la precisión de los servomotores con la eficiencia de un teclado matricial y la flexibilidad de Arduino abre un sinfín de posibilidades para la automatización y el control de dispositivos. Desde maquetas de trenes hasta sistemas de control industrial, la habilidad de mover elementos con exactitud y mediante una interfaz de usuario clara es invaluable. ¡Ahora es tu turno de ponerte el gorro de maquinista y empezar a mover esos servomotores!
Si quieres conocer otros artículos parecidos a Control Preciso de Servomotores con Teclado puedes visitar la categoría Librerías.