17/07/2025
En el vasto universo del desarrollo de software, las librerías son herramientas fundamentales que nos permiten construir proyectos complejos de manera eficiente. Imagina que estás investigando un tema y, en lugar de escribir cada palabra del conocimiento, tomas prestados libros de una biblioteca para extraer la información que necesitas. De manera similar, en el mundo de la programación, una librería es una colección de programas y funciones predefinidas que puedes incorporar a tu proyecto para añadir funcionalidades específicas sin tener que escribirlas desde cero. Esto no solo ahorra tiempo, sino que también reduce la probabilidad de errores y facilita la reutilización de código.

En el contexto de Arduino, una librería es un conjunto de funciones que puedes incluir de forma sencilla y explícita en tu sketch (el código de tu programa) para dotarlo de capacidades particulares. Por ejemplo, si necesitas manejar una pantalla LCD, existe una librería específica que, al ser incluida, te proporciona las funciones necesarias para interactuar con ella. Algunas librerías funcionan de manera independiente, mientras que otras requieren componentes electrónicos adicionales, como los populares 'shields' (escudos), que son placas que se acoplan al Arduino para expandir sus funcionalidades.
Existen tres categorías principales de librerías en Arduino: las de Core (o base), las Estándar y las Contribuidas. Cada una cumple un rol vital en el ecosistema de desarrollo, facilitando la interacción con el Microprocesador y permitiendo a los creadores enfocarse en la lógica de sus proyectos en lugar de en los detalles de bajo nivel del hardware.
- La Librería Core: El Corazón de Arduino
- Librerías Estándar: Expandiendo Horizontes
- Programación en un Entorno de Test: ArduinoTestSuite
- Usando la EEPROM como Sistema de Almacenamiento de Datos
- Almacenando Datos en una Tarjeta SD
- Conectándose con Ethernet
- Comunicaciones Serie con Firmata
- Visualizando Datos Usando la Librería LiquidCrystal
- Controlando un Motor Servo
- Controlando el Giro de un Motor de Pasos
- Comunicando con Periféricos SPI
- Comunicando con el Interface de Dos Hilos (I2C)
- Creando Más Puertas Serie con SoftwareSerial
- Las Librerías Contribuidas: La Comunidad al Poder
- Anatomía de una Librería: Por Dentro
- Utilización y Compartición de Librerías
- Preguntas Frecuentes sobre Librerías Arduino (FAQ)
La Librería Core: El Corazón de Arduino
La librería de Core es el pilar fundamental del entorno de desarrollo de Arduino (IDE). Su propósito primordial es abstraer y simplificar la intrincada complejidad que tradicionalmente conlleva trabajar directamente con microprocesadores. Esta abstracción es una de las principales razones por las que Arduino se ha vuelto tan accesible, tanto para principiantes como para usuarios experimentados que buscan una forma más ágil de desarrollar.
Los diseñadores de Arduino concibieron esta librería basándose en las necesidades más comunes de los estudiantes y usuarios. La mayoría de los proyectos implican leer datos de entradas o escribir datos en salidas. La librería core hace que estas tareas sean increíblemente sencillas de ejecutar. Por ejemplo, para leer el estado de un pin digital, basta con utilizar la función digitalRead(), cuyo nombre intuitivo facilita su memorización y uso.
Esta librería contiene las funciones esenciales que forman el núcleo del funcionamiento de Arduino, permitiendo una interacción fluida con el hardware subyacente sin necesidad de adentrarse en registros y operaciones a bajo nivel.
Librerías Estándar: Expandiendo Horizontes
Al descargar e instalar el entorno de desarrollo de Arduino (IDE) en tu ordenador, un conjunto de librerías Estándar se incluyen automáticamente. Estas librerías son seleccionadas por el equipo de desarrollo de Arduino porque se consideran ampliamente necesarias para una gran variedad de proyectos y usuarios.
A diferencia de la librería Core, las librerías estándar no se incluyen por defecto en tus sketches. Debes cargarlas explícitamente una por una, según las necesites. Esto asegura un uso más eficiente de los recursos de memoria del Arduino, ya que solo se cargan las funciones que realmente vas a utilizar. Para incluir una librería, simplemente añades una declaración #include al comienzo de tu sketch. Por ejemplo, para la librería de cristal líquido, que se usa para mostrar datos en una pantalla LCD, incluirías:
#include <LiquidCrystal.h>Es importante notar que el nombre de la librería debe ir entre los corchetes menor/mayor (< y >) y que la línea no termina con un punto y coma (;), a diferencia de la mayoría de las líneas de código en C++.
Programación en un Entorno de Test: ArduinoTestSuite
La forma de desarrollar programas para Arduino está en constante evolución. Una innovación reciente es la adopción del desarrollo bajo test (TDD, del inglés Test-Driven Development). En TDD, un proyecto se divide en módulos pequeños y, antes de escribir el código de un módulo, se definen pruebas que verificarán su correcto funcionamiento. La librería ArduinoTestSuite es un primer paso para implementar esta metodología en Arduino.
Aunque todavía en fase de desarrollo, esta librería es esencial para el futuro del desarrollo en Arduino, ya que permite probar los sketches antes de cargarlos en el hardware, asegurando que funcionen como se espera y evitando posibles daños a dispositivos costosos. A continuación, algunas de sus funciones:
| Test | Descripción |
|---|---|
| ATS_begin | Inicia el proceso de test. |
| ATS_end | Termina el proceso de test. |
| ATS_Test_DigitalPin | Testea un pin de entrada digital dado. |
| ATS_Test_PWM | Testea la salida PWM. |
| ATS_Test_AnalogInput | Testea la entrada analógica. |
| ATS_Test_EEPROM | Testea la EEPROM. |
| ATS_TestSerialLoopBack | Testea los pines RX y TX de una puerta Serie. |
| ATS_GetFreeMemory | Devuelve el número de posiciones libres de memoria en el Arduino. |
Usando la EEPROM como Sistema de Almacenamiento de Datos
La memoria EEPROM (Electrically Erasable Programmable Read-Only Memory) es un tipo de memoria no volátil que puede borrarse y reescribirse eléctricamente, y que conserva los datos incluso cuando el Arduino se apaga. La cantidad de memoria EEPROM varía según el microprocesador de base del Arduino:
| Microprocesador | Memoria EEPROM (bytes) |
|---|---|
| ATMega8 y ATMega168 | 512 |
| ATMega328 | 1.024 |
| ATMega1280 y ATMega2560 | 4.096 |
La librería EEPROM facilita el acceso a esta memoria, incluyendo funciones clave como read() y write():
| Función | Descripción |
|---|---|
| Read | Lee el valor de un byte almacenado en una posición de la EEPROM. |
| Write | Escribe un valor en una posición de la EEPROM. |
Es ideal para almacenar datos que necesitan persistir entre sesiones de uso, como contadores o configuraciones. Para volúmenes mayores de datos, se recomienda una tarjeta SD.
Almacenando Datos en una Tarjeta SD
Dado que el Arduino no posee una gran cantidad de memoria RAM ni almacenamiento masivo, para guardar volúmenes considerables de datos (como en la mayoría de las aplicaciones), se recurre a las tarjetas de memoria SD o SDHC. Estas memorias son ampliamente disponibles y económicas. Las diferencias entre SD y SDHC son:
| Tipo | Capacidad | Sistema de Almacenamiento de Ficheros |
|---|---|---|
| SD | 0–2 GB | FAT16 o FAT32 |
| SDHC | 4 GB–32 GB | FAT32 |
La librería SD, una envoltura más sencilla de la librería SdFat, permite al Arduino interactuar con estas tarjetas. Sus funciones básicas son:
| Clase | Función | Descripción |
|---|---|---|
| SD | begin | Inicializa la librería y la tarjeta SD. |
| exists | Verifica la existencia de un fichero o directorio. | |
| mkdir | Crea un directorio. | |
| rmdir | Suprime un directorio. | |
| remove | Suprime un fichero. | |
| open | Abre un fichero. | |
| File | available | Verifica si quedan bytes por leer en el fichero. |
| close | Cierra un fichero y asegura que los datos escritos han sido salvaguardados. | |
| seek | Busca una posición en un fichero. | |
| position | Devuelve la posición actual dentro del fichero. | |
| size | Devuelve el tamaño del fichero. | |
| Escribe datos en un fichero abierto. | ||
| println | Escribe datos en un fichero y añade un carácter “newline”. | |
| write | Escribe datos en un fichero. | |
| read | Lee un byte de un fichero abierto. |
La librería SD utiliza la nomenclatura 8.3 (8 caracteres para el nombre del fichero y 3 para la extensión), sin espacios. Se comunica con la tarjeta SD a través del bus SPI (pines digitales 11, 12, 13 en un Arduino estándar y 50, 51, 52 en un Mega), utilizando el pin 10 (o 53 en Mega) para la selección del dispositivo. Es importante formatear la tarjeta en FAT16 o FAT32 antes de usarla.
Conectándose con Ethernet
Para conectar tus aplicaciones Arduino a internet o a una red doméstica, la librería Ethernet es indispensable. Simplifica el acceso a funciones TCP/IP y está diseñada para interactuar con placas basadas en WIZnet W5100. Esta librería es muy completa y permite configurar el Arduino como servidor o cliente. Algunas de sus funciones son:
| Clase | Función | Descripción |
|---|---|---|
| Ethernet | begin | Inicializa la librería y configura los parámetros de red. |
| localIP | Devuelve la dirección IP local. | |
| dnsServerIP | Devuelve la dirección DNS del servidor. | |
| Server | Server | Crea un servidor. |
| begin | Comienza a escuchar posibles peticiones de conexión. | |
| available | Localiza un cliente con datos disponibles para lectura. | |
| write | Escribe datos a clientes (byte o char). | |
| Escribe datos a clientes (byte, char, int, long, string). | ||
| println | Escribe datos a clientes, seguidos por un “newline”. | |
| Client | Client | Crea un cliente. |
| connected | Devuelve TRUE si el cliente está conectado al servidor. | |
| connect | Conecta a la dirección IP y puerta especificada. | |
| write | Escribe datos a un servidor conectado. | |
| Escribe datos a un servidor (byte, char, int, long, string). | ||
| println | Escribe datos a un servidor seguido por un “newline”. | |
| available | Devuelve el número de bytes listos para su lectura. | |
| read | Lee el siguiente byte desde el servidor. | |
| flush | Desestima los bytes en espera de ser leídos. | |
| stop | Se desconecta del servidor. |
Comunicaciones Serie con Firmata
Firmata es un protocolo de comunicaciones que permite a un ordenador (PC o laptop) interactuar con uno o varios Arduinos y controlar sus microprocesadores desde el PC. La librería Firmata proporciona los métodos de comunicación serie necesarios para esta interacción, permitiendo controlar servos, motores, pantallas, LEDs, etc., desde tu ordenador a través de Arduino. Algunos de sus métodos más comunes incluyen:
| Categoría | Método | Descripción |
|---|---|---|
| Común | begin | Inicializa la librería Firmata. |
| printVersion | Envía versión del protocolo al PC. | |
| setFirmwareVersion | Establece la versión del firmware. | |
| Enviar Mensajes | sendAnalog | Envía un mensaje analógico. |
| sendDigitalPortPair | Envía el valor de un pin digital. | |
| sendsysex | Envía un comando con un array de bytes. | |
| sendString | Envía un string al PC. | |
| Recibir Mensajes | available | Comprueba que hay mensajes en el buffer de entrada. |
| processInput | Procesa los mensajes entrantes. | |
| attach | Asocia una función a un cierto tipo de mensaje de entrada. | |
| detach | Disocia una función de un cierto tipo de mensaje de entrada. |
Visualizando Datos Usando la Librería LiquidCrystal
Para visualizar información directamente en un pequeño display LCD, sin necesidad de un PC, la librería LiquidCrystal es la solución. La mayoría de estas pantallas se basan en el microprocesador Hitachi HD44780 o compatible, y son ideales para mostrar datos de sensores, mensajes de estado del sistema o cualquier otra información útil. Algunas de las funciones disponibles en esta librería son:
| Función | Descripción |
|---|---|
| begin | Establece las dimensiones en filas y columnas de la pantalla LCD. |
| LiquidCrystal | Inicializa la librería y determina los pines usados para comunicar con la pantalla LCD. |
| Visualiza datos en la pantalla LCD. | |
| clear | Borra los contenidos de la pantalla LCD. |
| setCursor | Posiciona el cursor sobre la pantalla. |
Controlando un Motor Servo
Los motores servo son ampliamente utilizados para controlar movimientos precisos en modelos de radio-control, robótica o cualquier aplicación que requiera un posicionamiento angular exacto. La librería Servo permite a un Arduino estándar controlar hasta 12 motores servo, y un Arduino Mega hasta 48. Las principales funciones de esta librería son:
| Función | Descripción |
|---|---|
| attach | Asigna el servo a un pin. |
| attached | Verifica que el servo está conectado al pin. |
| detach | Desconecta el servo del pin. |
| read | Lee el ángulo del servo. |
| write | Hace girar el eje del servo al ángulo especificado (0-180 grados en un servo clásico, o establece la velocidad en uno de rotación continua). |
| writeMicroseconds | Gira el eje del servo un arco expresado en microsegundos. |
Es importante saber que el uso de la librería Servo en un Arduino estándar deshabilita la función analogWrite() en los pines 9 y 10 del PWM. En el Mega, esto ocurre en los pines 11 y 12 si se controlan más de 12 servos.
Controlando el Giro de un Motor de Pasos
Un motor de pasos (stepper motor) gira su eje en incrementos angulares discretos, lo que permite un control de posición extremadamente preciso. La especificación de un motor de pasos suele indicar el número de pasos por revolución (ej., 200 pasos para una revolución completa de 360 grados). La librería Stepper nos proporciona las herramientas para controlar motores de pasos unipolares y bipolares con un Arduino, permitiendo establecer la velocidad de rotación y el número y dirección de los pasos. Sus funciones clave son:
| Función | Descripción |
|---|---|
| Stepper | Inicializa la librería Stepper y establece el número de pasos por revolución. |
| setSpeed | Establece la velocidad de rotación del motor en revoluciones por minuto (RPM). |
| step | Gira el motor el número de pasos indicado. Un número positivo gira en un sentido y uno negativo en el contrario. |
Comunicando con Periféricos SPI
El Bus Serie para Periféricos (SPI, del inglés Serial Peripheral Interface), también conocido como el bus de cuatro hilos, es un protocolo de comunicación síncrona utilizado para distancias cortas con periféricos externos como sensores, pantallas táctiles y controladores de videojuegos. Arduino también usa el bus SPI para comunicarse con tarjetas de memoria SD. Este protocolo funciona con un único maestro (el Arduino) y uno o más dispositivos esclavos. A pesar de la falta de un estándar formal, su uso es muy extendido. El protocolo utiliza cuatro hilos, de los cuales tres son comunes a cada dispositivo y el cuarto es específico para cada periférico:
| Designación | Descripción | Pin Arduino Estándar | Pin Mega |
|---|---|---|---|
| MISO | Master In Slave Out (envío datos al maestro) | 12 | 50 |
| MOSI | Master Out Slave In (envío datos al esclavo) | 11 | 51 |
| SCK | Reloj Serie | 13 | 52 |
| SS | Selección de Esclavo | Normalmente 10 | 53 |
La librería SPI proporciona las funciones necesarias para interactuar con estos periféricos:
| Función | Descripción |
|---|---|
| Begin | Inicializa el bus SPI y pone los pines MOSI y SCK en baja y SS en alta. |
| End | Desactiva el bus SPI. |
| setBitOrder | Establece el orden en el cual se cargan los bits en el bus (MSB o LSB). |
| setClockDivider | Establece el divisor de reloj SPI como una fracción del reloj del sistema. |
| setDataMode | Establece el modo de datos en el bus SPI (polaridad y fase del reloj). |
| Transfer | Transfiere un byte al bus. |
La función setDataMode() controla cómo se transmiten los datos entre el periférico esclavo y el maestro, basándose en la polaridad (CPOL) y fase (CPHA) del reloj:
| Modo | Polaridad del Reloj (CPOL) | Fase del Reloj (CPHA) |
|---|---|---|
| 0 | 0 | 0 |
| 1 | 0 | 1 |
| 2 | 1 | 0 |
| 3 | 1 | 1 |
Aunque puede parecer complejo, consultar las especificaciones del periférico te guiará para configurar correctamente estos parámetros.
Comunicando con el Interface de Dos Hilos (I2C)
El interface de dos hilos (TWI, Two Wire Interface), comúnmente conocido como I2C (Inter-Integrated Circuit), se utiliza para comunicar a baja velocidad con una amplia gama de dispositivos y componentes, como relojes de tiempo real, pantallas LCD, sensores ultrasónicos y potenciómetros digitales. Solo se necesitan dos pines para esta interfaz:
| Pin | Arduino Estándar | Mega |
|---|---|---|
| SDA (línea de datos) | Pin de entrada analógica 4 | Pin digital 20 |
| SCL (línea de reloj) | Pin de entrada analógica 5 | Pin digital 21 |
Con la librería Wire, el Arduino puede actuar como maestro o esclavo. Lo más común es que el Arduino sea el maestro, interactuando con hasta 112 dispositivos esclavos, cada uno con una dirección única. Las funciones más importantes de esta librería son:
| Función | Descripción |
|---|---|
| Begin | Inicializa la librería Wire y conecta el Arduino al bus I2C como maestro o esclavo. |
| requestFrom | Pide datos del esclavo al maestro. |
| beginTransmission | Prepara la transmisión de datos. |
| Send | Envía datos del esclavo al maestro o pone en cola bytes para la transmisión de maestro a esclavo. |
| endTransmission | Finaliza la transmisión de datos a un esclavo y envía los datos puestos en cola. |
| Available | Devuelve el número de bytes disponible para su recepción con receive. |
| Receive | Lee datos del buffer de recepción tras una llamada requestFrom o desde el maestro a un esclavo. |
| onReceive | Determina la función que se ha de activar cuando el esclavo recibe una transmisión del maestro. |
| onRequest | Determina la función que se ha de activar cuando el maestro pide datos al dispositivo esclavo. |
Creando Más Puertas Serie con SoftwareSerial
Muchos proyectos Arduino requieren al menos una puerta serie para comunicarse con dispositivos como GPS o pantallas LCD. La puerta serie consta de dos conexiones: RX para recibir y TX para enviar. Los Arduino Uno y Duemilanove tienen una puerta serie de hardware en los pines digitales 0 y 1. Si tu proyecto necesita más puertas serie, puedes optar por un Arduino Mega (con 4 puertos) o usar la librería SoftwareSerial, que emula puertos serie adicionales mediante software.
La versión original de SoftwareSerial tenía limitaciones de velocidad y cantidad de puertos, pero estas fueron superadas por la librería NewSoftSerial de Mikal Hart, que el equipo de Arduino incorporó como la nueva SoftwareSerial. Sus funciones incluyen:
| Función | Descripción |
|---|---|
| Begin | Activa la puerta y establece la velocidad de transmisión en baudios. |
| Available | Comienza a usar la puerta. |
| isListening | Devuelve la puerta activa en este momento. |
| listen | Escucha a esa puerta y la activa. |
| end | Termina el uso de esa puerta. |
| read | Lee datos de la puerta. |
| write | Escribe datos en la puerta. |
Esta librería permite crear múltiples puertas serie software con velocidades de hasta 115,000 baudios. Sin embargo, el Arduino solo puede escuchar o recibir datos de una puerta serie software a la vez (aunque puede transmitir por varias simultáneamente). Esto requiere una planificación cuidadosa en tu sketch, especialmente al manejar múltiples dispositivos serie. Aquí un ejemplo de cómo gestionar dos puertos:
#include <SoftwareSerial.h>
SoftwareSerial gpsPort(2, 3);
SoftwareSerial thermPort(4, 5);
void setup() {
gpsPort.begin(9600);
thermPort.begin(9600);
}
void loop() {
gpsPort.listen();
while (gpsPort.available() > 0) {
char inByte = gpsPort.read();
}
thermPort.listen();
while (thermPort.available() > 0) {
char inByte = thermPort.read();
}
}Las Librerías Contribuidas: La Comunidad al Poder
Además de las librerías Core y Estándar, existe un vasto ecosistema de librerías Contribuidas por la propia comunidad de usuarios de Arduino. Estas librerías no se distribuyen como parte del IDE, pero puedes encontrar una gran cantidad de ellas listadas en el sitio web de Arduino y en otros repositorios. Algunas son extensiones de las librerías estándar, añadiendo funciones suplementarias, mientras que otras están diseñadas para interactuar con dispositivos específicos, como consolas de juegos o sensores especializados.
Para utilizar una librería contribuida, necesitarás realizar algunas operaciones previas:
- Descarga la librería: Generalmente, vendrá en formato de archivo ZIP.
- Instálala en el IDE: Descomprime el archivo ZIP y copia los ficheros extraídos al directorio de librerías por defecto de Arduino. Si este directorio no existe, deberás crearlo. La estructura típica es
Documentos/Arduino/libraries/NombreDeLaLibreria/. - Reinicia el IDE: Si el IDE estaba abierto, ciérralo y ábrelo de nuevo para que detecte la nueva librería.
- Añade la librería a tu sketch: Una vez reiniciado, la librería estará disponible. Puedes incluirla en tu sketch seleccionando
Sketch > Importar Libreríadesde el menú del IDE.
Una vez añadida, la librería estará disponible para todos tus proyectos futuros, al igual que las librerías estándar. Cuando la importas en un sketch, todas sus funciones quedan accesibles.
Anatomía de una Librería: Por Dentro
Los sketches de Arduino se programan en C++, y gran parte de la complejidad interna del Arduino se oculta y simplifica gracias a las funciones disponibles en las diversas librerías, también escritas en C++. Una librería de Arduino está compuesta, al menos, por una clase de C++, que a su vez se define en dos archivos principales:
- Un fichero de cabecera (header), con extensión
.h. - Un fichero de implementación, con extensión
.cpp.
El Fichero Cabecera (.h)
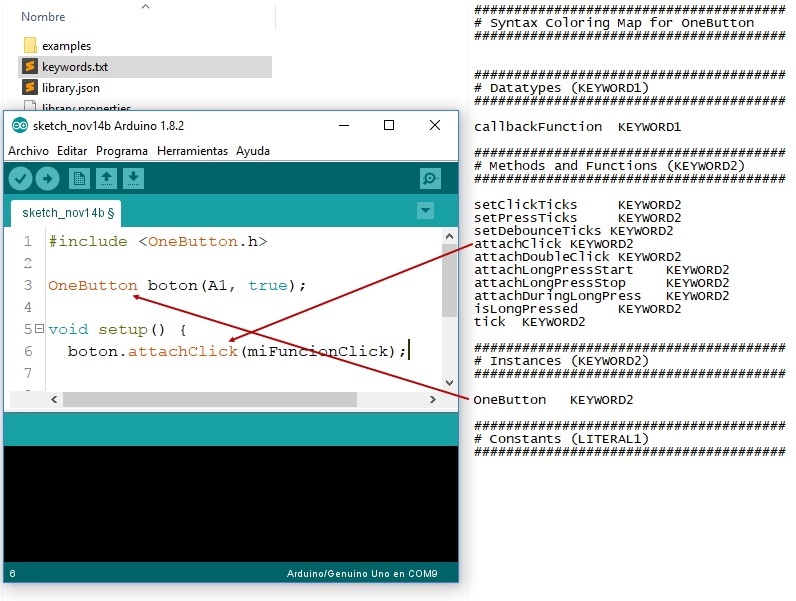
El fichero de cabecera (.h) actúa como un 'mapa' o 'interfaz' de la librería. Declara las funciones y variables que la librería pone a disposición del usuario, así como la estructura de la clase. Incluye directivas 'guard' para evitar que el código se incluya más de una vez durante la compilación, y puede incluir otras librerías necesarias. Dentro de la clase, se especifican las funciones y variables públicas (accesibles desde fuera de la librería) y privadas (accesibles solo dentro de la librería).
#ifndef DETMET_H // (1) Directiva 'guard' para evitar inclusiones múltiples
#define DETMET_H
#include <Arduino.h> // (2) Opcional: incluye la librería de Arduino si se usan sus elementos
class MetDet // Comienzo de la clase MetDet
{
public: // Declaraciones de miembros públicos
MetDet(); // (3) Constructor de la clase
void begin(); // Declara funciones públicas
void update();
private: // Declara miembros privados a la clase
int pollMetDet(); // Declara funciones privadas
int countFossils(int inputData);
};
#endif // (4) Marca el fin de la directiva ifndefEl Fichero de Implementación (.cpp)
El fichero .cpp es la 'carne' de la librería; contiene el código real que implementa las funciones y clases declaradas en el fichero .h. Aquí es donde se define la lógica de cada función.
#include "MetDet.h" // (1) Incluye el fichero de cabecera de la clase
MetDet::MetDet () { // (2) Implementación del constructor de la clase
// Aquí iría el código de inicialización si es necesario
}
void MetDet::begin() { // Define la función pública begin()
// Aquí iría el código para inicializar el sensor MetDet
}
void MetDet::update() { // Define la función pública update()
int data = pollMetDet();
int result = countMetales(data);
// Lógica para actualizar las lecturas del sensor
}
int MetDet::pollMetDet() { // Define la función privada pollMetDet()
// Aquí iría el código para realizar el sondeo de metales
return 0; // Ejemplo de retorno
}
int MetDet::countMetales(int inputData) { // Define la función privada countMetales()
// Aquí iría el código para contar el número de metales encontrados
return 0; // Ejemplo de retorno
}El operador de resolución de ámbito (::) se utiliza para indicar que una función o miembro pertenece a una clase específica (ej., MetDet::begin()).
Una vez que hayas creado tu librería, debes guardar los archivos .h y .cpp en un subdirectorio con el nombre de la librería dentro de la carpeta libraries de tu instalación de Arduino (ej., libraries/MetDet/MetDet.h y libraries/MetDet/MetDet.cpp).
Utilización y Compartición de Librerías
Una vez que tu librería está correctamente creada y almacenada en el directorio apropiado, puedes empezar a utilizarla en tus sketches. El proceso es similar a usar cualquier otra librería:
#include "MetDet.h" // (1) Incluye la librería MetDet
MetDet myMetDet; // (2) Inicializa una instancia de la clase MetDet
void setup() {
// Inicializa el sensor MetDet
myMetDet.begin();
}
void loop() {
// Actualiza la lectura del sensor continuamente
myMetDet.update();
}Para compartir tus librerías con la comunidad, es una buena práctica empaquetarlas en un archivo ZIP que contenga los ficheros .h y .cpp, junto con sketches de ejemplo que demuestren su uso. Los ejemplos deben ubicarse en un subdirectorio llamado Examples dentro de la carpeta de la librería (ej., Libraries/MetDet/Examples/MetDet.ino). Sitios como el Arduino Playground son excelentes lugares para compartir y encontrar código útil.
Preguntas Frecuentes sobre Librerías Arduino (FAQ)
¿Por qué usar librerías en Arduino?
Las librerías en Arduino son esenciales porque simplifican el proceso de programación al proporcionar bloques de código preescritos para funcionalidades comunes o complejas. Esto te permite ahorrar tiempo, reducir errores y concentrarte en la lógica de tu proyecto, en lugar de en los detalles de bajo nivel de la interacción con el hardware.
¿Cuál es la diferencia entre librerías Core, Estándar y Contribuidas?
La librería Core es el conjunto fundamental de funciones que vienen integradas en el IDE de Arduino y son esenciales para el funcionamiento básico del microcontrolador (ej. digitalRead(), delay()). Las librerías Estándar también se incluyen con la instalación del IDE, pero deben ser importadas explícitamente en cada sketch que las necesite (ej. LiquidCrystal, SD). Las librerías Contribuidas son desarrolladas por la comunidad y no vienen con el IDE; deben ser descargadas e instaladas manualmente.
¿Cómo se instala una librería contribuida?
Para instalar una librería contribuida, primero descárgala (generalmente en formato ZIP). Luego, descomprime el archivo y copia la carpeta resultante (que contiene los archivos .h y .cpp) en el directorio libraries dentro de tu carpeta de sketches de Arduino (normalmente en Documentos/Arduino/libraries/). Finalmente, reinicia el IDE de Arduino para que la nueva librería sea reconocida y esté disponible para su uso.
¿Puedo crear mis propias librerías?
¡Absolutamente! Crear tus propias librerías es una práctica avanzada y muy útil para organizar tu código, reutilizar funcionalidades en múltiples proyectos y compartir tus creaciones con otros. Implica escribir archivos de cabecera (.h) y de implementación (.cpp) que definen la estructura y la lógica de tu clase y funciones, siguiendo la estructura de C++.
¿Todas las librerías consumen la misma cantidad de memoria?
No, la cantidad de memoria que consume una librería varía significativamente. Depende de la complejidad de la librería, el número de funciones que contiene y cómo están implementadas. Algunas librerías, como la SD, son conocidas por consumir una cantidad considerable de memoria de programa, lo que puede limitar el tamaño de tu sketch. Es importante considerar el uso de la memoria al seleccionar y combinar librerías para tu proyecto.
¿Cómo sé qué pines usa una librería?
La documentación oficial de la librería, los ejemplos incluidos y el código fuente (los archivos .h y .cpp) son las mejores fuentes para determinar qué pines usa una librería y cómo configurarlos. Algunas librerías especifican los pines en sus constructores, mientras que otras pueden usar pines fijos o predeterminados. Además, es importante estar atento a posibles conflictos de pines entre diferentes librerías que uses en el mismo proyecto.
Si quieres conocer otros artículos parecidos a Explorando las Librerías de Arduino: Guía Completa puedes visitar la categoría Librerías.