10/10/2023
En el vasto universo de la electrónica y la programación con Arduino, la comunicación entre diferentes dispositivos es fundamental para dar vida a proyectos complejos e interactivos. Una de las herramientas más potentes y versátiles para lograr esta interconexión es la librería Wire.h, el estándar de Arduino para la comunicación a través del bus I2C (Inter-Integrated Circuit), también conocido como “Two Wire Interface” (TWI) o “Bus de Dos Hilos”. Esta librería simplifica enormemente la tarea de conectar múltiples componentes, como sensores, pantallas LCD o incluso otros microcontroladores, utilizando un mínimo de conexiones físicas. Si alguna vez te has preguntado cómo hacer que tus dispositivos Arduino hablen entre sí o con periféricos de forma eficiente, Wire.h es la respuesta que estabas buscando.
El bus I2C es una tecnología de comunicación serie bidireccional que permite la interacción entre un maestro (normalmente tu Arduino) y múltiples dispositivos esclavos. Su principal ventaja radica en la capacidad de conectar hasta 127 dispositivos diferentes utilizando solo dos líneas de comunicación, además de la conexión a tierra: SDA (Serial Data Line) para los datos y SCL (Serial Clock Line) para la señal de reloj. Esta eficiencia en el cableado lo convierte en una elección popular para proyectos donde el espacio y el número de pines disponibles son críticos.
¿Qué es el Bus I2C y Cómo Funciona?
El bus I2C es un protocolo de comunicación síncrono, lo que significa que ambos dispositivos (maestro y esclavo) comparten una señal de reloj común (SCL) para sincronizar la transferencia de datos. La línea SDA es bidireccional, permitiendo tanto el envío como la recepción de datos. Una característica clave del I2C es su naturaleza direccionable: cada dispositivo conectado al bus debe tener una dirección única. Esta dirección permite al maestro identificar y comunicarse con un esclavo específico sin interferir con los demás. Las direcciones I2C son de 7 bits, lo que teóricamente permite hasta 128 direcciones (0 a 127). Sin embargo, algunas de estas direcciones están reservadas para propósitos especiales, como la dirección de “transmisión” (0) o usos futuros (120 a 127), dejando un rango útil para tus dispositivos esclavos que va desde 8 hasta 119.
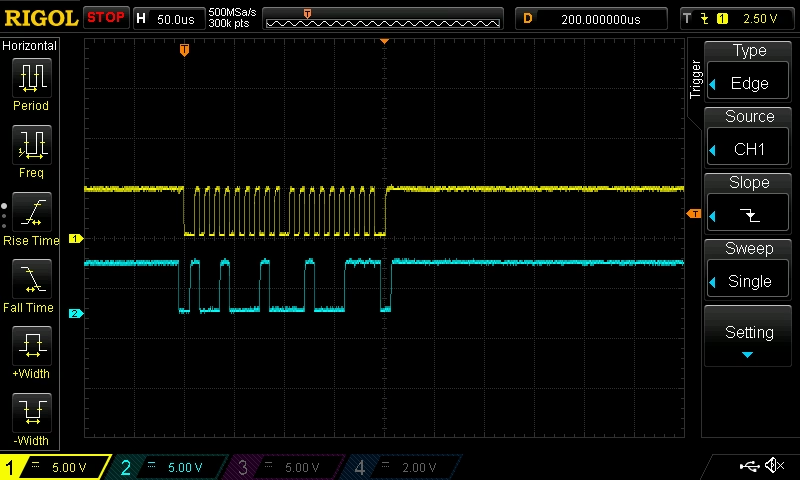
El proceso de comunicación I2C comienza con una “condición de inicio” generada por el maestro, que indica el inicio de una transmisión. Esta condición se produce cuando la línea SDA pasa de HIGH a LOW mientras SCL está en HIGH. A continuación, el maestro envía la dirección de 7 bits del esclavo con el que desea comunicarse, seguida de un bit de lectura/escritura (0 para escribir, 1 para leer). Si un esclavo reconoce su dirección, responde con una señal de ACK (Acknowledgment), tirando la línea SDA a LOW. Si no hay respuesta o el esclavo no está presente, se produce un NAK (Negative Acknowledgment). Una vez establecida la conexión, el maestro o el esclavo (dependiendo de si es una operación de escritura o lectura) comienza a enviar bytes de datos, un bit a la vez, comenzando por el bit más significativo (MSB). Cada byte transmitido es confirmado por el receptor con un ACK. La comunicación finaliza con una “condición de parada”, donde SDA pasa de LOW a HIGH mientras SCL está en HIGH, liberando el bus para otras comunicaciones.
La Librería Wire.h: Tu Aliada en Arduino
La librería Wire.h es la implementación estándar del protocolo I2C para Arduino, proporcionando una interfaz sencilla para interactuar con dispositivos I2C. Desde Arduino 1.0, la librería hereda de la clase Stream, lo que la hace compatible con otras bibliotecas de lectura/escritura y estandariza las funciones de E/S. Esto significa que las funciones `send()` y `receive()` fueron reemplazadas por las más genéricas `write()` y `read()`, facilitando una experiencia de programación más coherente.
Pines I2C en Diferentes Placas Arduino
Aunque el principio de SDA y SCL es universal, la ubicación física de estos pines varía entre las diferentes placas Arduino. Es crucial identificar los pines correctos para asegurar una conexión adecuada:
| Placa Arduino | Pin SDA | Pin SCL |
|---|---|---|
| UNO, Ethernet | A4 | A5 |
| MEGA | 20 | 21 |
| Leonardo | 2 | 3 |
| Due | 20 | 21 |
Una nota importante: a diferencia de la mayoría de los Arduinos, el ESP8266 no posee un hardware TWI dedicado. Por lo tanto, la implementación de I2C en el ESP8266 se realiza por software, lo que te brinda la flexibilidad de usar cualquier pin GPIO. Por defecto, `Wire.begin()` asignará los pines 4 (SDA) y 5 (SCL), pero puedes especificar otros pines utilizando `Wire.begin(SDApin, SCLpin)`.
Métodos Clave de la Librería Wire.h
La librería Wire.h ofrece un conjunto de métodos intuitivos para manejar la comunicación I2C. Aquí te presentamos los más utilizados:
| Método | Descripción |
|---|---|
Wire.begin() o Wire.begin(num) o Wire.begin(SDApin, SCLpin) | Inicializa la librería Wire y une el dispositivo al bus I2C como maestro o esclavo. Para esclavos, se especifica su dirección (8-119). Normalmente se llama una sola vez en setup(). |
Wire.beginTransmission(num) | Inicia una transmisión al dispositivo esclavo con la dirección num. Después de llamar a esta función, los bytes se encolan con Wire.write() y se envían con Wire.endTransmission(). |
Wire.write(dato) o Wire.write(dato, longitud) | Pone uno o varios bytes de datos en el búfer del maestro para ser transmitidos a un esclavo. Se utiliza después de beginTransmission(). |
Wire.read() | Lee un byte de dato del búfer que ha sido recibido de un maestro o esclavo. Se usa después de Wire.requestFrom() o dentro de la función de interrupción onReceive(). |
Wire.onReceive(evento) | Registra una función de usuario (evento) que se ejecutará automáticamente cuando el dispositivo reciba datos como esclavo. |
Wire.onRequest(evento) | Registra una función de usuario (evento) que se ejecutará automáticamente cuando el maestro solicite datos del esclavo. |
Wire.endTransmission() | Termina la comunicación y envía los bytes encolados. Libera los pines I2C. Devuelve 0 si la transmisión fue exitosa. |
Wire.requestFrom(address, quantity) | Solicita quantity de bytes desde el dispositivo esclavo con la address. El maestro esperará a que los datos estén disponibles en el búfer. |
Configuración de la Velocidad de Reloj
La velocidad del reloj del bus I2C es un factor crucial para el rendimiento y la compatibilidad con diferentes dispositivos. La librería Wire.h permite ajustar esta velocidad mediante el registro TWBR (Two Wire Bus Bit Rate Register) y el pre-escalador. La velocidad por defecto suele ser de 100 kHz, pero se puede aumentar a 400 kHz (modo rápido) o reducir para mayor estabilidad en ciertas condiciones.
| TWBR | Pre-escalador | Frecuencia (SCL) | Comentario |
|---|---|---|---|
| 12 | 1 | 400 kHz | Máxima soportada por muchos dispositivos |
| 32 | 1 | 200 kHz | |
| 72 | 1 | 100 kHz | Por defecto en Arduino UNO |
| 152 | 1 | 50 kHz | |
| 78 | 4 | 25 kHz | |
| 158 | 4 | 12.5 kHz |
Para configurar, por ejemplo, el pre-escalador en 4 (para 12.5 kHz), se haría de la siguiente manera después de Wire.begin():
Wire.begin();
TWBR = 158;
TWSR |= bit(TWPS0); // Configura el pre-escalador TWPS0 a 1, TWPS1 a 0 para 4xGestión de Direcciones I2C
Como se mencionó, las direcciones I2C son de 7 bits. Es común encontrar hojas de datos que especifican direcciones de 8 bits (donde el último bit indica lectura/escritura). Si encuentras una dirección de 8 bits (por ejemplo, 192 o 0xC0 para escritura, 193 o 0xC1 para lectura), simplemente divídela por dos o desplázala un bit a la derecha para obtener la dirección de 7 bits que requiere la librería Wire.h. Por ejemplo, 192 / 2 = 96 (0x60). Recuerda que las direcciones del 0 al 7 y del 120 al 127 están reservadas y no deben usarse para tus esclavos.
Consideraciones Importantes y Consejos Prácticos
Aunque la librería Wire.h es robusta, hay varios aspectos a tener en cuenta para asegurar una comunicación I2C fluida y sin problemas:
- Resistencias Pull-up: El bus I2C requiere resistencias pull-up en las líneas SDA y SCL. La mayoría de las placas Arduino ya las tienen integradas o las Wire.h las habilita implícitamente, pero si usas cables largos o tienes varios esclavos, puede ser necesario añadir resistencias pull-up externas de 4.7kΩ para garantizar la integridad de la señal.
- Conexión a Tierra (GND): Siempre conecta los pines GND de todos los dispositivos I2C al GND de tu Arduino. Una conexión a tierra común es esencial para la referencia de voltaje y una comunicación estable.
- Tamaño del Búfer: El búfer de transmisión y recepción de la librería Wire.h tiene un tamaño limitado (generalmente 32 bytes). Esto significa que no puedes enviar o recibir más de 32 bytes en una sola transmisión. Para datos más grandes, deberás dividir la información en múltiples transmisiones.
- Datos Multi-byte: Si necesitas transmitir datos de más de un byte (como un entero de 2 bytes o un largo de 4 bytes), deberás descomponerlos en bytes individuales antes de enviarlos y reconstruirlos en el receptor. Funciones como
lowByte(),highByte(), y operadores de desplazamiento de bits (<<,>>) son tus aliados aquí. - Direcciones Repetidas: Cada dispositivo esclavo debe tener una dirección única en el bus. Si dos dispositivos comparten la misma dirección, se producirán conflictos y la comunicación fallará. Algunos dispositivos I2C ofrecen pines de configuración (como A0, A1, A2) que permiten cambiar su dirección y así tener múltiples instancias del mismo sensor en el bus.
¿Cuándo Buscar Alternativas a Wire.h?
Si bien Wire.h es suficiente para la mayoría de las aplicaciones, existen situaciones específicas donde podría no ser la opción más adecuada:
- Pines I2C en Uso: Si los pines SDA/SCL dedicados ya están ocupados por otros componentes o funcionalidades en tu proyecto.
- Microcontroladores de Baja Frecuencia/Memoria: En procesadores como el ATtiny con 1 MHz, donde la memoria (flash y RAM) es muy limitada, o si se requiere un rendimiento extremadamente ligero.
- Control Fino del Bus: Si necesitas un control muy preciso sobre la temporización del bus I2C o si tus dispositivos operan a voltajes muy bajos (como 3V) y las resistencias pull-up implícitas de Wire.h no son ideales.
- Uso de Múltiples Buses I2C: Para proyectos que requieren varios buses I2C independientes, o si trabajas con MCUs ARM (como Arduino Due, Zero, Teensy 3.x) o pines en puertos superiores (ATmega2560).
En estos casos, librerías alternativas como la adaptación de la librería I2C de Peter Fleury (escrita en ensamblador AVR, muy ligera y rápida) o SlowSoftI2CMaster (escrita en C++ y más flexible para pines arbitrarios) podrían ser más apropiadas.
Ejemplos Prácticos de Aplicación
La versatilidad de Wire.h se demuestra mejor a través de ejemplos concretos:
- Maestro Controlando un Esclavo: Un escenario común donde un Arduino maestro envía comandos o datos a un dispositivo esclavo (por ejemplo, un driver de motor o un expansor de pines) para que realice una acción específica. El maestro utiliza
Wire.beginTransmission()yWire.write()para enviar los datos, yWire.endTransmission()para finalizar la comunicación. - Comunicación Bidireccional entre Arduinos: Permite que un Arduino actúe como maestro y otro como esclavo, intercambiando información. El esclavo configura su dirección con
Wire.begin(address)y define funciones conWire.onReceive()para procesar los datos recibidos yWire.onRequest()para enviar datos cuando el maestro los solicite conWire.requestFrom(). Esto es ideal para sistemas distribuidos donde cada Arduino maneja una parte de la lógica. - Lectura de Sensores I2C: Muchos sensores modernos utilizan el protocolo I2C para comunicar sus lecturas. Con Wire.h, el maestro puede enviar un comando para solicitar datos del sensor (por ejemplo, temperatura, humedad, presión) y luego leer los valores recibidos.
- Escaneo de Dispositivos I2C: Una herramienta invaluable para la depuración es un escáner I2C. Este programa itera a través de todas las posibles direcciones I2C (8 a 119) y verifica si un dispositivo responde con un ACK. Si lo hace, imprime la dirección, lo que te ayuda a confirmar que tus dispositivos están conectados y funcionando correctamente, y a descubrir sus direcciones si no las conoces.
Preguntas Frecuentes sobre la Librería Wire.h
P: ¿Necesito resistencias pull-up externas para el bus I2C?
R: Generalmente, los módulos I2C y las placas Arduino ya tienen resistencias pull-up integradas o la librería Wire.h las habilita internamente. Sin embargo, si utilizas cables largos (más de 15-20 cm) o tienes varios dispositivos en el bus, es recomendable añadir resistencias pull-up externas de 4.7kΩ en las líneas SDA y SCL para asegurar la estabilidad de la señal.
P: ¿Qué pasa si mis dispositivos I2C tienen la misma dirección?
R: Si dos o más dispositivos en el mismo bus I2C comparten la misma dirección, se producirá un conflicto. El maestro intentará comunicarse con una dirección específica, pero ambos dispositivos responderán o interferirán entre sí, lo que resultará en datos corruptos o falta de comunicación. Asegúrate de que cada esclavo tenga una dirección única.
P: ¿Cuál es el tamaño máximo de datos que puedo enviar en una sola transmisión I2C con Wire.h?
R: El búfer interno de la librería Wire.h para la transmisión y recepción de datos es de 32 bytes. Esto significa que no puedes enviar o recibir más de 32 bytes en una única llamada a Wire.write() o Wire.read(). Para cantidades mayores, deberás fragmentar tus datos en bloques de 32 bytes o menos y enviarlos en transmisiones consecutivas.
P: ¿Puedo usar cualquier pin digital para I2C con la librería Wire.h?
R: En la mayoría de las placas Arduino (UNO, Mega, Leonardo, Due), los pines I2C (SDA y SCL) están fijos a pines específicos (por ejemplo, A4/A5 en el UNO). No puedes usar pines arbitrarios con la implementación estándar de Wire.h. Sin embargo, en plataformas como el ESP8266, que implementan I2C por software, sí puedes especificar pines GPIO personalizados en la función Wire.begin(SDApin, SCLpin).
P: ¿Cómo puedo depurar problemas de comunicación I2C?
R: Un escáner de bus I2C es una herramienta fundamental. Este código (como se muestra en el ejemplo 4 y 5 del texto original) te permite identificar qué dispositivos están conectados y en qué dirección. Además, verifica que todas las conexiones estén correctas (especialmente GND), que las resistencias pull-up sean adecuadas y que las direcciones de tus esclavos sean las correctas y únicas.
Conclusión
La librería Wire.h es una piedra angular en el desarrollo de proyectos con Arduino que requieren comunicación entre múltiples dispositivos. Su simplicidad y eficiencia para manejar el bus I2C la convierten en una herramienta indispensable para cualquier entusiasta o profesional. Al comprender cómo funciona, cómo configurar sus métodos y las consideraciones importantes, podrás integrar una amplia gama de sensores y módulos, expandiendo enormemente las capacidades de tus proyectos. Desde la lectura de datos de sensores hasta la orquestación de múltiples Arduinos, Wire.h abre un mundo de posibilidades para la interconexión inteligente de tus sistemas electrónicos.
Si quieres conocer otros artículos parecidos a Wire.h: Dominando la Comunicación I2C en Arduino puedes visitar la categoría Librerías.