29/06/2023
En el vasto universo de la electrónica y la robótica, los motores servo son componentes esenciales para lograr movimientos angulares precisos y controlados. Desde brazos robóticos hasta sistemas de dirección para vehículos a escala, los servos ofrecen una solución compacta y eficiente. Sin embargo, controlarlos directamente puede ser complejo debido a la necesidad de generar señales de modulación por ancho de pulso (PWM) muy específicas. Aquí es donde entra en juego la Librería Servo de Arduino, una herramienta fundamental que simplifica drásticamente esta tarea, permitiendo a entusiastas y profesionales por igual concentrarse en la funcionalidad de sus proyectos en lugar de en la intrincada generación de señales. Esta librería actúa como un puente entre la complejidad del hardware y la simplicidad de la programación, abriendo un mundo de posibilidades para la automatización y el control de movimiento.
¿Qué son los Servomotores y por qué son tan útiles?
Antes de sumergirnos en la librería, es crucial entender qué es un servomotor. Un servomotor es un motor DC que incorpora un sistema de retroalimentación para controlar su posición angular. Esto significa que puedes indicarle al servo que se mueva a un ángulo específico (por ejemplo, 90 grados), y él intentará mantener esa posición con alta precisión. A diferencia de un motor DC estándar que gira continuamente, un servo tiene un rango de movimiento limitado (comúnmente 0 a 180 grados, aunque existen de 360 grados o rotación continua).
Su utilidad reside en la capacidad de posicionamiento exacto. Son omnipresentes en:
- Proyectos de robótica (articulaciones de brazos, pinzas).
- Vehículos de radio control (dirección, alerones).
- Sistemas de automatización (apertura de válvulas, compuertas).
- Proyectos de arte interactivo.
El control de un servo se realiza mediante una señal PWM (Pulse Width Modulation) en su pin de señal. La duración del pulso determina el ángulo al que se moverá el servo. Un pulso típico de 1.5 milisegundos puede colocar el servo en la posición central (90 grados), mientras que pulsos más cortos o más largos lo moverán hacia los extremos de su rango. Gestionar estas duraciones de pulso de forma manual sería tedioso y propenso a errores; la Librería Servo de Arduino se encarga de todo esto por nosotros.
La Librería Servo de Arduino: Un Vistazo Profundo
La Librería Servo es una de las librerías estándar que vienen preinstaladas con el entorno de desarrollo integrado (IDE) de Arduino, lo que la hace accesible para cualquier usuario desde el primer momento. Su objetivo principal es abstraer la complejidad de la generación de señales PWM específicas para servos, permitiendo a los programadores controlar estos dispositivos con unas pocas líneas de código intuitivas.
Una de las características más destacadas y convenientes de esta librería es su compatibilidad universal. Tal como se ha confirmado, "Esta librería es compatible con todas las arquitecturas, por lo que debería poder utilizarla en todas las placas Arduino". Esto es una gran ventaja, ya que significa que el código que escribas para controlar un servo en una placa Arduino Uno funcionará sin modificaciones en una Arduino Mega, un ESP32, un ESP8266, o cualquier otra placa compatible con el IDE de Arduino. Esta portabilidad facilita enormemente el desarrollo de proyectos y la migración entre diferentes plataformas hardware, asegurando que tus conocimientos y tu código sean reutilizables.
Funciones Clave de la Librería Servo
La librería ofrece un conjunto de funciones sencillas pero potentes:
attach(pin): Asocia un objeto Servo a un pin digital específico de Arduino. Este pin se utilizará para enviar la señal de control al servo. Es el primer paso para "activar" el servo en tu código.write(angle): Mueve el servo al ángulo especificado. El ángulo es un valor entero entre 0 y 180 (por defecto para la mayoría de los servos estándar).writeMicroseconds(us): Una alternativa awrite(), permite especificar la duración del pulso directamente en microsegundos. Esto es útil para servos que requieren un control más fino o que tienen un rango de movimiento diferente al estándar de 0-180 grados.read(): Devuelve el ángulo actual al que se supone que está el servo (el último valor escrito).attached(): Comprueba si el objeto Servo está actualmente asociado a un pin. Devuelvetruesi está adjunto,falseen caso contrario.detach(): Desasocia el objeto Servo del pin. Esto libera el temporizador que la librería estaba utilizando para ese servo, permitiendo que el pin se use para otras funciones o para ahorrar energía.
Estas funciones proporcionan un control completo y flexible sobre los servomotores, permitiendo desde movimientos simples hasta secuencias complejas.
¿Cuántos Servos se Pueden Controlar? Desentrañando el Límite
La pregunta sobre cuántos motores (servos) soporta la librería es crucial. La respuesta directa proporcionada fue "None", lo cual puede parecer confuso si se interpreta como "ninguno". Sin embargo, en el contexto de una librería de software, "None" a menudo significa que la librería no impone un límite numérico estricto a nivel de software. En otras palabras, no hay una línea de código dentro de la librería que diga "solo puedes controlar un máximo de X servos".
El verdadero factor limitante no es la librería en sí, sino los recursos de hardware de la placa Arduino que estás utilizando, específicamente sus temporizadores (timers) y la cantidad de pines PWM disponibles. Los servomotores requieren una señal PWM continua y precisa. En las placas Arduino, esta señal es generada por temporizadores internos.
- Arduino Uno y Similares (ATmega328P): Estas placas tienen un número limitado de temporizadores. La librería Servo utiliza uno de estos temporizadores para generar las señales PWM. Típicamente, en un Arduino Uno, la librería puede controlar hasta 12 servos simultáneamente. Esto se debe a que utiliza el Timer1 para generar las señales para todos ellos. Si intentas controlar más de 12, es posible que los servos adicionales no funcionen correctamente o que haya conflictos con otras funciones que también utilicen temporizadores (como
tone()o ciertas librerías de control de motores). - Arduino Mega (ATmega2560): Las placas Mega tienen más temporizadores y pines PWM, lo que les permite controlar un número significativamente mayor de servos. Una Arduino Mega puede manejar hasta 48 servos de forma nativa con la librería Servo, aprovechando sus múltiples temporizadores.
Es importante destacar que, aunque la librería pueda "soportar" un cierto número de servos en términos de generación de señal, la alimentación eléctrica es otro factor crítico. Cada servomotor consume corriente, especialmente cuando está en movimiento o bajo carga. Conectar múltiples servos directamente a los 5V de la placa Arduino es una receta para el desastre, ya que la placa no puede suministrar suficiente corriente. Esto puede provocar un comportamiento errático de los servos, reinicios de la placa, o incluso daños. Por lo tanto, para cualquier configuración con más de uno o dos servos pequeños, es imprescindible usar una fuente de alimentación externa robusta para los servos, con su tierra común conectada a la tierra de la placa Arduino.
Configuración y Conexión de Servos
El proceso para conectar y controlar un servo es bastante directo:
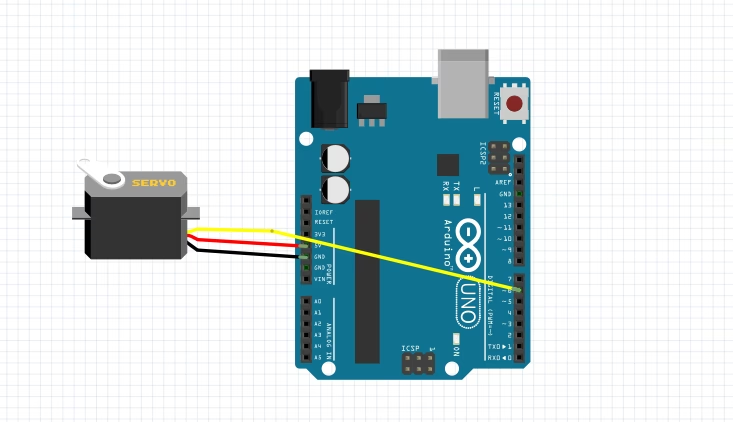
- Conexión Física:
- Cable de Señal (Blanco/Amarillo/Naranja): Conéctalo a un pin digital PWM del Arduino (ej. pin 9 o 10 en Uno).
- Cable de Alimentación (Rojo): Conéctalo a los +5V de una fuente de alimentación externa (si usas múltiples servos) o al pin 5V del Arduino (para 1 o 2 servos pequeños).
- Cable de Tierra (Negro/Marrón): Conéctalo a la tierra (GND) de la fuente de alimentación externa y asegúrate de que esa tierra esté conectada a la tierra (GND) del Arduino. ¡La tierra común es vital!
- Código Arduino:
- Incluye la librería:
#include <Servo.h> - Crea un objeto Servo:
Servo miServo; - Asocia el servo a un pin en
setup():miServo.attach(9); - Controla el servo en
loop():miServo.write(angulo);
- Incluye la librería:
Consideraciones Avanzadas y Solución de Problemas
Aunque la librería simplifica mucho el control, hay aspectos que considerar para proyectos más complejos o para solucionar problemas comunes.
Tipos de Servos: Estándar vs. Rotación Continua
La mayoría de los servos son de rotación limitada (0-180 grados). Sin embargo, existen servos de rotación continua que se modifican para funcionar como pequeños motores DC, donde la duración del pulso PWM controla la velocidad y dirección de giro, en lugar de una posición angular específica. Para estos, un pulso de 1.5ms suele ser el punto de "parada", mientras que pulsos más cortos giran en una dirección y más largos en la otra. La librería Servo puede controlarlos perfectamente, solo cambia la interpretación de los valores write().
Conflicto de Temporizadores
Como se mencionó, la librería Servo utiliza temporizadores específicos del microcontrolador. En el Arduino Uno, por ejemplo, utiliza el Timer1. Si tu proyecto utiliza otras librerías o funciones que también dependen del Timer1 (como algunas funciones PWM avanzadas, la librería Tone para generar sonidos, o ciertas librerías de motores paso a paso), podrías experimentar conflictos. Esto puede manifestarse como un comportamiento errático de los servos o de la otra función. Si te enfrentas a esto, investiga qué temporizadores usa cada componente o considera una placa Arduino con más temporizadores disponibles.
Problemas Comunes y Soluciones
- Servo tiembla o "jitter":
- Problema de alimentación: La causa más común. Asegúrate de que los servos tengan una fuente de alimentación externa adecuada y que las tierras estén conectadas.
- Ruido en la señal: Cables largos o de mala calidad pueden introducir ruido. Usa cables cortos y apantallados si es posible.
- Problemas de código: Asegúrate de que no estás enviando señales a los servos demasiado rápido o con valores inválidos.
- Servo no se mueve o se mueve erráticamente:
- Conexiones incorrectas: Verifica que los cables de señal, alimentación y tierra estén conectados correctamente.
- Fuente de alimentación insuficiente: Como se mencionó, crucial para múltiples servos.
- Servo dañado: Aunque menos común, un servo defectuoso no responderá.
- Valores de ángulo fuera de rango: Si el servo espera 0-180 y le envías 200, no funcionará.
Tabla Comparativa: Capacidad de Servos por Placa Arduino
Para ilustrar la diferencia en la capacidad de control de servos entre las placas más populares, consideremos la siguiente tabla que resume las capacidades típicas al usar la Librería Servo:
| Placa Arduino | Microcontrolador | Pines PWM | Temporizadores | Servos Soportados (Librería Servo) | Notas Importantes |
|---|---|---|---|---|---|
| Arduino Uno | ATmega328P | 6 | 3 (Timer0, Timer1, Timer2) | Hasta 12 | Utiliza Timer1 para todos los servos. Requiere fuente externa para >2 servos. |
| Arduino Mega 2560 | ATmega2560 | 15 | 6 (Timer0-Timer5) | Hasta 48 | Utiliza múltiples temporizadores. Ideal para proyectos con muchos servos. Requiere fuente externa. |
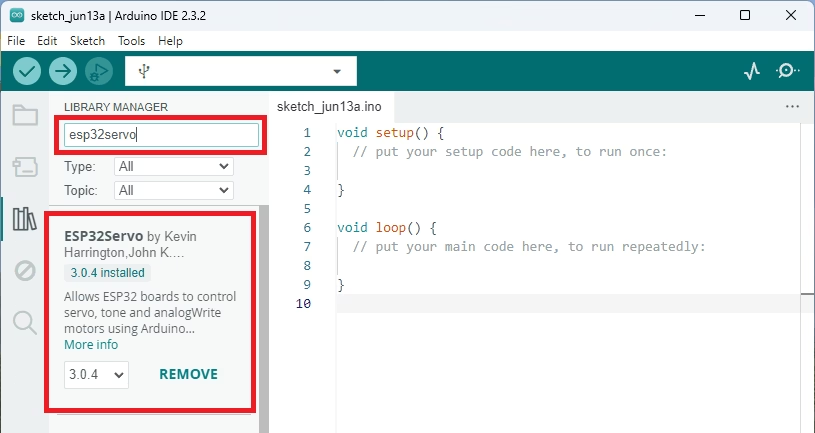
| ESP32 | ESP32 | ~16 (configurable) | 2 (LEDC PWM Controller) | Numerosos (depende de la librería PWM específica, no la Servo de Arduino directamente) | La librería Servo de Arduino no es nativa para ESP32, se usa una implementación compatible. La capacidad real dependerá de la implementación de PWM del ESP32. |
| ESP8266 | ESP8266 | 10 (GPIOs) | N/A (PWM por software o hardware limitado) | Limitado (pocos, o por software) | Similar al ESP32, la librería Servo de Arduino no es nativa. PWM por software o usando un solo temporizador de hardware. Menos recomendado para muchos servos. |
Nota: Los valores de "Servos Soportados" son aproximados y pueden variar ligeramente dependiendo de la versión del IDE de Arduino, las librerías específicas y otros usos de los temporizadores en tu código.
Preguntas Frecuentes sobre la Librería Servo de Arduino
¿Es la librería Servo compatible con todas las placas Arduino?
Sí, absolutamente. La librería Servo de Arduino está diseñada para ser compatible con todas las arquitecturas de placas Arduino. Esto significa que puedes usarla con un Arduino Uno, Mega, Leonardo, Due, e incluso con placas basadas en ESP32 o ESP8266 (aunque para estas últimas, la implementación subyacente de PWM puede variar, la interfaz de la librería se mantiene consistente). Esta universalidad la convierte en una herramienta muy versátil.
¿Cuántos servos puedo controlar con la librería Servo?
La librería Servo en sí misma no impone un límite numérico estricto. El número real de servos que puedes controlar depende de los recursos de hardware de tu placa Arduino, principalmente los temporizadores disponibles y los pines PWM. En un Arduino Uno, puedes controlar hasta 12 servos. En un Arduino Mega, este número se eleva hasta 48. Para un rendimiento óptimo y evitar problemas de alimentación, siempre se recomienda usar una fuente de alimentación externa para los servos cuando se controlan más de uno o dos, independientemente de la placa.
¿Necesito una fuente de alimentación externa para mis servos?
Sí, es altamente recomendable y a menudo necesario. Los servomotores pueden consumir una cantidad significativa de corriente, especialmente cuando están bajo carga o en movimiento. El regulador de voltaje a bordo de las placas Arduino no está diseñado para suministrar la alta corriente que múltiples servos pueden demandar. Conectar varios servos directamente al pin de 5V del Arduino puede provocar inestabilidad en la placa, reinicios inesperados o incluso daños permanentes. Para uno o dos servos pequeños, el Arduino podría ser suficiente, pero para cualquier configuración más grande, una fuente de alimentación externa dedicada para los servos es crucial. Asegúrate de conectar la tierra de la fuente externa a la tierra del Arduino.
¿Qué tipo de servos puedo usar con esta librería?
La librería Servo es compatible con la mayoría de los servos RC estándar que operan con un rango de señal de pulso de 1 a 2 milisegundos y un ciclo de repetición de 20 milisegundos (50 Hz). Esto incluye tanto los servos de posición limitada (que giran entre 0 y 180 grados) como los servos de rotación continua. Para los servos de rotación limitada, la función write() acepta ángulos de 0 a 180. Para los de rotación continua, los valores de write() controlan la velocidad y dirección de giro (por ejemplo, 90 es detener, 0 es velocidad máxima en una dirección, 180 es velocidad máxima en la otra).
¿Por qué mi servo no se mueve o tiembla (jitter)?
Los problemas de movimiento o el "jitter" (temblor) en los servos suelen deberse a una de estas causas:
- Falta de alimentación adecuada: La razón más común. Los servos necesitan suficiente corriente. Usa una fuente de alimentación externa con capacidad de corriente suficiente y asegúrate de que todas las tierras (Arduino y fuente del servo) estén conectadas.
- Conexiones incorrectas: Revisa los cables de señal, alimentación y tierra. Un cable suelto o mal conectado puede causar problemas.
- Ruido en la señal PWM: Esto puede ocurrir con cables muy largos o en entornos con mucha interferencia electromagnética.
- Conflicto de temporizadores: Si otras librerías o funciones están utilizando el mismo temporizador que la librería Servo, puede haber interferencias.
- Servo dañado: En raras ocasiones, el servo mismo puede estar defectuoso.
Conclusión
La Librería Servo de Arduino es una herramienta indispensable para cualquier proyecto que requiera control preciso de movimiento angular. Su facilidad de uso, junto con su excepcional compatibilidad con todas las placas Arduino, la convierte en la opción predilecta para dar vida a robots, brazos mecánicos y una infinidad de automatizaciones. Aunque la librería no impone límites numéricos de software, es fundamental entender las limitaciones de hardware de tu placa y, crucialmente, la necesidad de una fuente de alimentación externa adecuada para manejar múltiples servos. Dominar esta librería te abrirá las puertas a un mundo de creación robótica y automatización, permitiéndote transformar ideas complejas en realidades funcionales con un esfuerzo sorprendentemente mínimo.
Si quieres conocer otros artículos parecidos a Control de Servos con Librería Arduino: Guía Completa puedes visitar la categoría Librerías.