21/02/2023
Los servomotores son componentes esenciales en el mundo de la robótica y la automatización, permitiéndonos controlar con una precisión asombrosa el movimiento angular o la velocidad de giro. Si alguna vez te has preguntado cómo lograr que un brazo robótico se mueva exactamente a una posición o cómo hacer que un robot se detenga suavemente, la respuesta a menudo reside en el uso inteligente de un servomotor con una placa Arduino. Esta guía completa te sumergirá en el fascinante universo de los servomotores, desde su funcionamiento básico hasta técnicas avanzadas de control, con un enfoque especial en cómo detenerlos eficazmente en tus proyectos con Arduino.
- ¿Qué es un Servomotor y Cómo Funciona?
- Tipos de Servomotores: ¡Conócelos!
- El Corazón del Artículo: ¿Cómo Detener un Servomotor en Arduino?
- Conectando tu Servomotor a Arduino: Guía Paso a Paso
- Programación del Servomotor con Arduino: La Librería Servo.h
- Ejemplos de Código Arduino para Servomotores
- Control Avanzado: Potenciómetros y Múltiples Servos
- Especificaciones Comunes de Servomotores
- Preguntas Frecuentes (FAQ)
- Conclusión
¿Qué es un Servomotor y Cómo Funciona?
Un servomotor es mucho más que un simple motor; es un sistema de control integrado que permite posicionar su eje con gran precisión en un ángulo específico. A diferencia de un motor de corriente continua tradicional que gira libremente, un servomotor incorpora internamente un motor de corriente continua, una caja de engranajes que reduce la velocidad y aumenta el par, un potenciómetro que mide la posición actual del eje, y una placa de control electrónica. Este conjunto forma un sistema de control de lazo cerrado: la electrónica interna compara la posición deseada (indicada por la señal de control) con la posición actual (medida por el potenciómetro) y ajusta el motor hasta que ambas coinciden. Cuando la posición deseada se alcanza, el servomotor se detiene y mantiene esa posición, resistiendo cualquier fuerza externa que intente moverlo.
Componentes y Cables Esenciales
Físicamente, un servomotor suele contar con tres cables distintivos, cada uno con una función vital:
- GND (Tierra): Generalmente de color negro o marrón, es el cable de conexión a tierra.
- Power (Alimentación): Usualmente de color rojo, es el cable por donde se suministra la energía (comúnmente 5V) al servomotor.
- Control (Señal): Típicamente amarillo, naranja o blanco, es el cable por donde se envía la señal de control desde tu microcontrolador, como un Arduino.
La Magia de la Señal PWM
El control del servomotor se logra mediante una señal PWM (Modulación por Ancho de Pulso). Esta señal consiste en una secuencia de pulsos, donde el ancho de cada pulso determina la posición o el comportamiento del motor. La mayoría de los servomotores comerciales esperan un pulso cada 20 milisegundos (ms), lo que equivale a una frecuencia de 50 Hz. El ancho de este pulso es lo que realmente importa:
- Un pulso de 1 ms suele posicionar el servomotor en 0 grados.
- Un pulso de 1.5 ms lo posiciona en 90 grados (la posición central o neutral).
- Un pulso de 2 ms lo posiciona en 180 grados.
Es importante destacar que estos valores pueden variar ligeramente entre diferentes modelos y fabricantes de servomotores, por lo que una calibración inicial es siempre recomendable para asegurar un control óptimo.
Tipos de Servomotores: ¡Conócelos!
Aunque el principio de funcionamiento es similar, existen dos tipos principales de servomotores que encontrarás en el mercado, cada uno diseñado para aplicaciones diferentes:
Servomotores de 180 Grados: Control de Posición
Estos son los servomotores más comunes y se utilizan cuando se necesita un control preciso de la posición angular en un rango limitado, generalmente de 0 a 180 grados (aunque algunos pueden tener rangos ligeramente menores o mayores, como 90 o 270 grados). Son ideales para mover brazos robóticos, abrir y cerrar compuertas, o ajustar la orientación de sensores.
Servomotores de 360 Grados (Rotación Continua): Velocidad y Dirección
A diferencia de los servomotores de 180 grados, los de 360 grados, también conocidos como servos de rotación continua, no permiten un control de posición angular específico. En su lugar, interpretan el ancho del pulso PWM como una instrucción de velocidad y dirección de giro. Son perfectos para aplicaciones donde se requiere un movimiento constante, como el control de las ruedas en pequeños robots móviles o en sistemas de transporte donde la velocidad es la variable principal.
El Corazón del Artículo: ¿Cómo Detener un Servomotor en Arduino?
La forma de detener un servomotor depende directamente del tipo de servomotor que estés utilizando. Es un concepto clave para cualquier proyecto de control.
Deteniendo un Servomotor de 180 Grados
Para detener un servomotor de posición (el de 180 grados), el proceso es sorprendentemente sencillo: simplemente le asignas el ángulo deseado. Una vez que el servomotor recibe la instrucción de ir a, por ejemplo, 45 grados, se moverá a esa posición y se detendrá automáticamente allí, manteniéndola. No necesitas enviar una señal específica de 'detener'. El propio mecanismo de control de lazo cerrado del servo se encarga de esto. Por ejemplo, si tu servo está en 0 grados y quieres que se detenga en 90 grados, simplemente escribes `myservo.write(90);` y se detendrá una vez que llegue a esa posición.
Deteniendo y Controlando un Servomotor de 360 Grados
Los servomotores de rotación continua (360 grados) requieren un enfoque diferente para detenerse, ya que no tienen posiciones fijas. En estos servos, la señal PWM controla la velocidad y el sentido de giro. Para detener un servomotor de 360 grados, debes enviarle la señal que corresponde a la posición neutral de un servo de 180 grados, es decir, el valor intermedio. En la mayoría de los casos, esto se logra enviando un pulso equivalente a 1.5 ms, que con la librería Servo de Arduino, se traduce en el valor de 90 grados.
Así, para detener un servomotor de 360 grados con Arduino, usarías la instrucción:
servo.write(90);Esto hará que el motor se detenga y no gire en ningún sentido.
Control de Velocidad en Servos de 360 Grados
Con un servomotor de 360 grados, no solo puedes detenerlo, sino también controlar su velocidad y sentido de giro. Aunque el control de velocidad no es tan preciso como con un motor paso a paso o un motor DC con encoder, es suficiente para muchas aplicaciones:
- Para máxima velocidad en sentido horario (CW): Envía un valor de
0.
servo.write(0);180.servo.write(180);90.servo.write(90);Los valores intermedios entre 0 y 90 grados controlarán el giro en sentido horario, disminuyendo la velocidad a medida que te acercas a 90. De manera similar, los valores entre 90 y 180 grados controlarán el giro en sentido antihorario, aumentando la velocidad a medida que te acercas a 180.
Conectando tu Servomotor a Arduino: Guía Paso a Paso
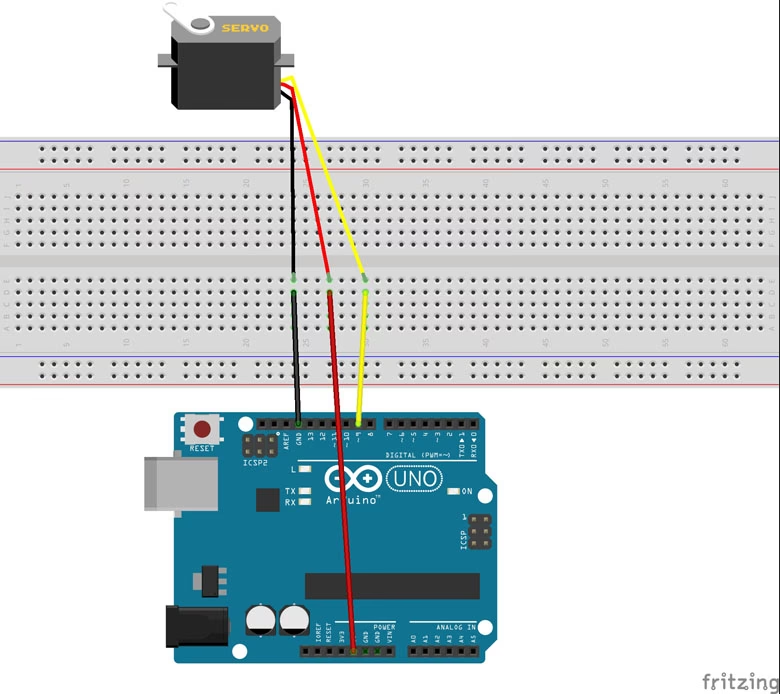
La conexión de un servomotor a tu placa Arduino es bastante directa, ya que solo requiere tres cables. Sin embargo, hay consideraciones importantes, especialmente en lo que respecta a la alimentación.
Las conexiones estándar son:
- Cable de Señal (Amarillo/Naranja/Blanco): Conéctalo a cualquier pin digital de Arduino que soporte PWM. Para el control de servomotores, la librería Servo.h puede usar cualquier pin digital, no solo los pines PWM marcados con '~'. Un pin común es el 9.
- Cable de Alimentación (Rojo): Conéctalo a la salida de 5V de tu Arduino.
- Cable de Tierra (Negro/Marrón): Conéctalo a un pin GND de tu Arduino.
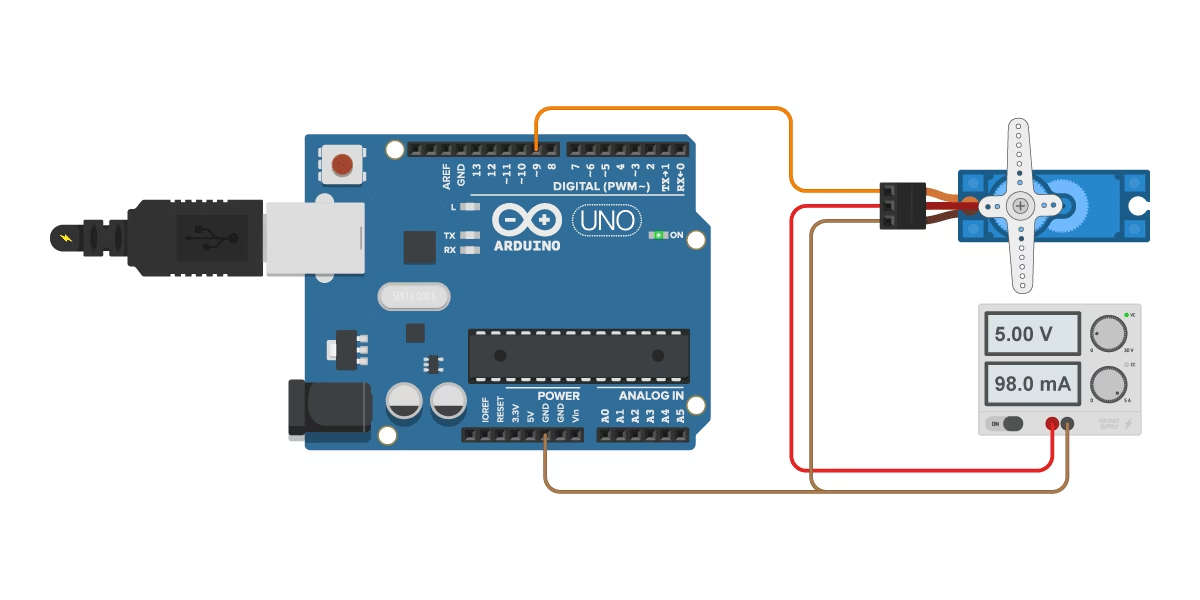
Alimentación del Servomotor: ¿Arduino o Fuente Externa?
Esta es una de las consideraciones más importantes. Un micro servo pequeño como el SG90 puede ser alimentado directamente desde el pin de 5V del Arduino sin problemas, ya que su consumo de corriente es bajo (alrededor de 10 mA en reposo y hasta 250 mA en movimiento). Sin embargo, si estás utilizando múltiples servomotores o servomotores más grandes (como los de tamaño estándar como el MG996R, que pueden consumir más de 1 amperio bajo carga), es imperativo utilizar una fuente de alimentación externa. El regulador de voltaje de Arduino no está diseñado para suministrar grandes cantidades de corriente, y exceder su límite (generalmente alrededor de 300-500 mA) puede dañar tu placa.
Cuando uses una fuente de alimentación externa para el servomotor, asegúrate de conectar el pin GND de la fuente externa al pin GND del Arduino. Esto es crucial para establecer una referencia de tierra común y asegurar que las señales de control se interpreten correctamente.
Programación del Servomotor con Arduino: La Librería Servo.h
Arduino facilita enormemente el control de servomotores gracias a su librería integrada `Servo.h`. Esta librería simplifica la generación de las señales PWM necesarias y te permite controlar hasta 12 servos en un Arduino Uno/Nano y hasta 48 en un Arduino Mega.
Funciones Clave de la Librería Servo
Para empezar a programar, lo primero es incluir la librería:
#include <Servo.h>Luego, debes crear un objeto de tipo Servo. Por ejemplo:
Servo myservo; // Se crea un objeto 'myservo'Las funciones más utilizadas son:
servo.attach(pin): Asocia el objeto Servo a un pin digital de Arduino. Es fundamental para que Arduino sepa qué pin usará para controlar el servo.myservo.attach(9); // Asocia el servo al pin digital 9servo.attach(pin, min, max): Esta es una versión extendida de `attach()` que te permite especificar los anchos de pulso mínimos y máximos en microsegundos (μs) que corresponden a los ángulos de 0 y 180 grados, respectivamente. Esto es crucial para la calibración.myservo.attach(9, 500, 2500); // Calibra el servo para que 0 grados sea 500us y 180 grados sea 2500usLos valores por defecto son 544μs y 2400μs, pero pueden necesitar ajuste.

Controlar estos motores con Arduino es muy fácil. En el post sobre servomotores expliqué los colores de los cables del servomotor. Para conectar los servomotores, todos los cables rojos irán a 5 voltios. Los chocolates a tierra y los naranja irán a los pines D5, D6, D7 y D8 del Arduino. Es una conexión sencilla, lo demás es programación. servo.write(angle): Mueve el servomotor al ángulo especificado (para servos de 180 grados) o establece la velocidad/dirección (para servos de 360 grados). El valor del ángulo va de 0 a 180.myservo.write(90); // Mueve el servo a 90 grados o lo detiene si es de 360 gradosservo.read(): Retorna la posición actual en grados (0-180) en la que se cree que está el servomotor. Esto es útil para saber dónde se encuentra el servo en cualquier momento.int currentAngle = myservo.read();
Calibración de tu Servomotor
La calibración es un paso importante para asegurar que tu servomotor se mueva exactamente como esperas. Como se mencionó, los valores de 1ms y 2ms para 0 y 180 grados son aproximados. Algunos servos pueden alcanzar su límite físico antes o después de estos pulsos. Utilizando la función `attach(pin, min, max)`, puedes ajustar los valores `min` y `max` en microsegundos para que tu servo realice un barrido completo de su rango de movimiento sin forzarse.
Se recomienda empezar con los valores por defecto (544, 2400) y ajustarlos en pequeños incrementos (10-20 μs) hasta encontrar los puntos exactos donde el servo alcanza sus límites sin emitir ruidos extraños o vibrar, lo que indicaría que está forzando sus engranajes.
Ejemplos de Código Arduino para Servomotores
Servomotor Convencional (180 grados) - Control por Puerto Serial
Este ejemplo te permite controlar un servomotor de 180 grados enviando un ángulo (0-180) a través del monitor serial de Arduino. Conecta el cable de señal del servo al PIN 5 de tu Arduino.
#include <Servo.h> // Incluye la Librería Servo int degree = 0; String words; Servo servo1; // Se crea un objeto "servo1" void setup() { Serial.begin(9600); Serial.println("Servos - Arduino"); servo1.attach(5,600,2400); // Asocia el servo al pin 5, con valores min y max calibrados (pueden variar) servo1.write(0); } void loop() { while (Serial.available()) { // Lee el valor enviado por el Puerto Serial delay(5); char c = Serial.read(); // Lee los caracteres words += c; // Convierte caracteres a cadena de caracteres } if (words.length() > 0){ degree = words.toInt(); // Convierte la cadena a entero Serial.print(degree); // Envía el valor en Grados Serial.println(" Grados"); delay(5); servo1.write(degree); // Mueve el servo al ángulo recibido while(servo1.read() < degree - 3 && servo1.read() > degree + 3) { // Espera a que el servo se acerque al ángulo // Se puede añadir un feedback, por ejemplo, Serial.println("Desplazando..."); } } words = ""; // Inicializa la cadena para la siguiente lectura }Servomotor de 360 Grados - Control de Detención, Sentido y Velocidad
Para este ejemplo, reemplaza tu servomotor convencional por uno de giro continuo (360 grados). A través del monitor serial, podrás enviarle comandos para detenerlo, o hacerlo girar en sentido horario o antihorario.
#include <Servo.h> // Incluye la Librería Servo int dir=0,menu=1,opc=0; char c='\0'; String words; Servo servo1; // Se crea un objeto "servo1" void setup() { Serial.begin(9600); Serial.println("Servo 360 - Arduino"); servo1.attach(5); // Asocia el servo al pin 5 servo1.write(90); // Inicializa el servo detenido } void loop() { if(menu==1){ Serial.println(" "); Serial.println("------------ DIGITE UNA OPCIÓN ENTRE 1 Y 3 -------------"); Serial.println("1) Detener Motor"); Serial.println("2) Sentido Horario"); Serial.println("3) Sentido Anti-Horario"); menu=0; } while (Serial.available()) { // Lee el valor enviado por el Puerto Serial delay(5); c = Serial.read(); // Lee los caracteres words += c; // Convierte caracteres a cadena de caracteres } opc=words.toInt(); if (opc!=0){ if(opc>=1 && opc<=3){ switch(opc){ case 1: servo1.write(90); // Detener el motor Serial.println(">>>>> Motor DETENIDO! <<<<<<"); break; case 2: servo1.write(0); // Girar en sentido horario (máxima velocidad) Serial.println(">>>>> GIRANDO SENTIDO CW <<<<<<"); break; case 3: servo1.write(180); // Girar en sentido antihorario (máxima velocidad) Serial.println(">>>>> GIRANDO SENTIDO CCW <<<<<<"); break; } }else{ Serial.println(" OPCIÓN INVALIDA!!!! INTENTE NUEVAMENTE"); } menu=1; opc=0; } words = ""; // Inicializa la cadena para la siguiente lectura }Control Avanzado: Potenciómetros y Múltiples Servos
Controlando un Servo con un Potenciómetro
Controlar la posición de un servomotor con un potenciómetro es una forma intuitiva de manipular su ángulo manualmente. Para ello, conecta los pines extremos del potenciómetro a 5V y GND, y el pin central a una entrada analógica de Arduino (por ejemplo, A0). El Arduino leerá el valor analógico (entre 0 y 1023) y lo mapeará al rango de 0 a 180 grados para el servo.
#include <Servo.h> // Incluye la librería necesaria #define servoPin 9 // Pin de Arduino para el servo #define potPin A0 // Pin de Arduino para el potenciómetro int angle = 0; // Variable para almacenar la posición del servo en grados int reading = 0; // Variable para almacenar la lectura de la entrada analógica Servo myservo; // Crea un nuevo objeto de la clase servo void setup() { myservo.attach(servoPin); } void loop() { reading = analogRead(potPin); // Lee la entrada analógica (valor entre 0 y 1023) // Mapea la entrada de 0-1023 a un valor entre 0 y 180 grados para el servo angle = map(reading, 0, 1023, 0, 180); myservo.write(angle); // Indica al servo que vaya a la posición establecida delay(15); // Espera 15 ms para que el servo alcance la posición }La función map() es muy útil aquí, ya que escala un rango de valores a otro. En este caso, convierte la lectura del potenciómetro (0-1023) al rango de ángulos del servo (0-180).
Gestionando Múltiples Servomotores
Si tu proyecto requiere controlar varios servomotores, la librería Servo.h lo hace muy fácil. Simplemente necesitas crear un objeto `Servo` por cada motor y asociarlo a un pin digital diferente.
Recuerda la advertencia sobre la alimentación: Cuando uses varios servos, es casi seguro que necesitarás una fuente de alimentación externa para evitar sobrecargar el Arduino. Siempre comparte la conexión GND entre Arduino y la fuente de alimentación externa.
#include <Servo.h> Servo servo1; Servo servo2; Servo servo3; Servo servo4; Servo servo5; void setup() { servo1.attach(9); servo2.attach(10); servo3.attach(11); servo4.attach(12); servo5.attach(13); } void loop() { // Mueve todos los servos a 0 grados servo1.write(0); servo2.write(0); servo3.write(0); servo4.write(0); servo5.write(0); delay(2000); // Mueve todos los servos a 90 grados servo1.write(90); servo2.write(90); servo3.write(90); servo4.write(90); servo5.write(90); delay(1000); // Mueve todos los servos a 180 grados servo1.write(180); servo2.write(180); servo3.write(180); servo4.write(180); servo5.write(180); delay(1000); }Aunque el Arduino Uno puede controlar hasta 12 servos y el Mega hasta 48, el límite real suele estar en la capacidad de corriente de tu fuente de alimentación.
Especificaciones Comunes de Servomotores
Conocer las especificaciones de tu servomotor es clave para elegir el adecuado para tu proyecto. Aquí te presentamos un resumen de algunos modelos populares:
Tabla de Especificaciones de Servomotores Populares
| Modelo | Voltaje de Operación | Peso | Torque (4.8V) | Tipo de Engranaje | Velocidad (4.8V) | Temperatura de Operación |
|---|---|---|---|---|---|---|
| SG90 (Micro Servo) | 4.8 V | 9 g | 1.8 kg/cm | POM (Plástico) | 0.12 seg/60° | 0 – 55 °C |
| MG90S (Metal Gear) | 4.8 V | 13.4 g | 1.8 kg/cm | Metal (6061-T6 aluminio) | 0.10 seg/60° | 0 – 55 °C |
| MG996R (Standard) | 4.8 – 6.6 V | 55 g | 9.4 kg/cm | Metal | 0.19 seg/60° | 0 – 55 °C |
Nota sobre los pines: Para la mayoría de estos servos, el pinout es consistente: Marrón (GND), Rojo (VCC/Power), Amarillo/Naranja/Blanco (Señal PWM).
Preguntas Frecuentes (FAQ)
¿Por qué mi servomotor no gira de 0 a 180 grados completos?
Esto es muy común y se debe a que los valores de ancho de pulso predeterminados de la librería Servo (544μs para 0° y 2400μs para 180°) no siempre coinciden perfectamente con los límites físicos de tu servomotor específico. La solución es calibrarlo utilizando la función myservo.attach(pin, min, max). Deberás experimentar con los valores min y max (en microsegundos) hasta que el servo realice su barrido completo sin forzarse o hacer ruidos extraños.
¿Por qué no se pueden alimentar los servomotores directamente desde el Arduino?
Aunque los microservos pequeños sí se pueden alimentar directamente del Arduino, los servomotores más grandes o el uso de múltiples servos pueden demandar más corriente de la que el regulador de voltaje de tu placa Arduino puede proporcionar de forma segura (normalmente, un máximo de 500 mA, aunque se recomienda no superar los 300 mA para evitar problemas de estabilidad y daños). Si el servo intenta consumir más corriente de la que el Arduino puede suministrar, puede provocar un reinicio inesperado de la placa, un comportamiento errático del servo o, en el peor de los casos, dañar el regulador de voltaje del Arduino. Por eso, para servos de tamaño estándar o múltiples servos, siempre se recomienda una fuente de alimentación externa con la tierra común conectada al Arduino.
¿Cuál es la diferencia principal entre un servomotor de 180 grados y uno de 360 grados?
La diferencia fundamental radica en su control: un servomotor de 180 grados está diseñado para control de posición, lo que significa que puedes enviarle un ángulo específico (entre 0 y 180 grados) y se moverá y detendrá en esa posición. Un servomotor de 360 grados (o de rotación continua), en cambio, está diseñado para control de velocidad y dirección. No puedes especificar una posición angular, sino que le indicas qué tan rápido y en qué sentido debe girar. El valor de 90 grados lo detiene, valores menores a 90 lo hacen girar en un sentido y mayores a 90 en el otro, con la velocidad variando según qué tan lejos esté el valor de 90.
¿Puedo controlar la velocidad de un servomotor de 180 grados?
No directamente. Un servomotor de 180 grados está diseñado para ir a una posición específica y detenerse. Su velocidad de movimiento entre dos posiciones está determinada por sus características internas (engranajes, motor, electrónica) y no se puede controlar directamente a través de la señal PWM como lo harías con un servo de 360 grados. Si necesitas simular un control de velocidad, podrías moverlo en pequeños incrementos con retrasos, pero esto es más un control de trayectoria que de velocidad real del motor.
Conclusión
Dominar el uso de servomotores con Arduino abre un mundo de posibilidades para tus proyectos, desde pequeños robots que navegan de forma autónoma hasta sistemas de automatización del hogar que requieren movimientos precisos. Hemos explorado desde los fundamentos de cómo funciona un servomotor y sus distintos tipos, hasta las técnicas esenciales para conectarlos y programarlos con la popular librería Servo de Arduino. Lo más importante, ahora sabes cómo detener cada tipo de servomotor de manera efectiva, un conocimiento crucial para el control preciso en cualquier aplicación. Recuerda siempre considerar la alimentación adecuada para tus servos y no dudes en experimentar con la calibración para obtener el máximo rendimiento. ¡Ahora estás listo para llevar tus proyectos al siguiente nivel con el control exacto que ofrecen los servomotores!
Si quieres conocer otros artículos parecidos a Control Preciso: Cómo Detener un Servomotor Arduino puedes visitar la categoría Librerías.