10/04/2023
Los Controladores de Motor Pololu Simple son dispositivos extraordinariamente versátiles, diseñados para ofrecer un control preciso y eficiente de motores DC con escobillas. Su amplio rango de operación, que va desde los 5.5 V hasta los 40 V, y su capacidad para entregar cientos de vatios en un formato compacto, los convierten en la elección ideal para una vasta gama de aplicaciones de control de motores. Desde proyectos de robótica hasta sistemas de automatización, estos controladores simplifican la integración del control de motores en diversas configuraciones, gracias a sus múltiples interfaces y a una gran cantidad de ajustes configurables.
- ¿Qué son los Controladores de Motor Pololu Simple?
- Modelos y Especificaciones Técnicas
- Componentes y Hardware Incluido
- Software y Compatibilidad de Controladores
- Primeros Pasos con el Centro de Control Pololu Simple Motor
- Manejo de Errores y Diagnóstico
- Feedback Visual: Los LEDs Indicadores
- Conexiones Eléctricas: Guía Detallada
- Configuración Avanzada del Controlador
- Preguntas Frecuentes (FAQs)
- ¿Qué es un Controlador de Motor Pololu Simple?
- ¿Cuáles son las principales interfaces de control que soporta?
- ¿Puedo usar una batería de 24V con todos los modelos?
- ¿Cómo instalo los controladores en Windows?
- ¿Qué información me proporciona la pestaña de estado del Centro de Control?
- ¿Qué significan los LEDs del controlador?
- ¿Cómo puedo mitigar el ruido eléctrico del motor?
- ¿Qué es el modo de mezcla (Mixing Mode) y para qué sirve?
- ¿Qué son los interruptores de límite o de seguridad (Kill Switches)?
- ¿Qué es la función de 'Arranque Seguro' (Safe Start) y cómo la gestiono?
¿Qué son los Controladores de Motor Pololu Simple?
En esencia, un Controlador de Motor Pololu Simple es un puente entre tu sistema de control (ya sea una computadora, un microcontrolador, un receptor RC o un joystick) y un motor DC. Estos dispositivos son reconocidos por su facilidad de uso, a pesar de sus numerosas características. Una utilidad de configuración gratuita, compatible con Windows y Linux, simplifica la configuración inicial, permitiendo pruebas y monitoreo del controlador en tiempo real a través de USB.
Características Clave y Adicionales
Los Controladores Pololu Simple ofrecen un control bidireccional de un motor DC con escobillas. Sus características principales incluyen:
- Amplio Rango de Voltaje de Operación: De 5.5 V a 30 V para las versiones 18v7, 18v15 y 18v25, o hasta 40 V para las versiones 24v12 y 24v23.
- Alta Corriente de Salida Continua: Desde 7 A hasta 25 A sin disipador de calor, dependiendo del modelo, lo que permite manejar motores de diversas potencias.
- Cuatro Opciones de Comunicación/Control:
- Interfaz USB: Para conexión directa a una PC.
- Interfaz Serial TTL: Para uso con microcontroladores o sistemas embebidos.
- Interfaz de Pulso RC: Para usar como un ESC (Electronic Speed Control) controlado por RC.
- Interfaz de Voltaje Analógico: Para potenciómetros o joysticks analógicos.
- Configuración Sencilla: A través de un programa de configuración gratuito (Simple Motor Control Center) que facilita la puesta en marcha y el monitoreo.
Además de estas, cuentan con características adicionales que mejoran la seguridad y la precisión:
- Aceleración y desaceleración máximas ajustables, para proteger el sistema.
- Velocidad de arranque, velocidad máxima y cantidad de frenado ajustables.
- Controles de seguridad opcionales para evitar arranques inesperados del motor.
- Calibración de entrada y escalado ajustable para señales analógicas y RC.
- Apagado por subtensión con histéresis, ideal para baterías sensibles a la descarga excesiva (como las LiPo).
- Umbral y respuesta de sobretemperatura ajustables.
- Frecuencia PWM ajustable de 1 kHz a 22 kHz, eliminando vibraciones audibles del motor.
- LED de error vinculado a una salida digital ERR, permitiendo la interconexión de errores entre múltiples controladores.
- Firmware actualizable en campo.
Modelos y Especificaciones Técnicas
Los Controladores de Motor Simple están disponibles en varias versiones, cada una optimizada para diferentes rangos de voltaje de entrada y corriente de salida. Es crucial elegir el modelo adecuado para tu aplicación, especialmente si trabajas con baterías de 24V.
| Modelo | Voltaje Máx. Absoluto | Voltaje Máx. Recomendado1 | Corriente Continua Máx. (sin disipador) | Ancho | Largo | Peso2 | Con conectores instalados |
|---|---|---|---|---|---|---|---|
| 18v7 | 30 V | 24 V | 7 A | 1.1" (2.8 cm) | 2.1" (5.3 cm) | 7 g | Sí |
| 18v15 | 30 V | 24 V | 15 A | 1.1" (2.8 cm) | 2.1" (5.3 cm) | 7 g | Sí |
| 24v12 | 40 V | 34 V | 12 A | 1.1" (2.8 cm) | 2.1" (5.3 cm) | 7 g | Sí |
| 18v25 | 30 V | 24 V | 25 A | 1.2" (3.1 cm) | 2.3" (5.8 cm) | 12 g | No |
| 24v23 | 40 V | 34 V | 23 A | 1.2" (3.1 cm) | 2.3" (5.8 cm) | 12 g | No |
1 No se recomienda usar las versiones 18v7, 18v15 o 18v25 con baterías de 24 V, ya que pueden exceder significativamente los 24 V cuando están completamente cargadas. Las versiones 24v12 y 24v23 son mucho más apropiadas para aplicaciones de 24 V.
2 Este es el peso de la placa sin pines de cabecera, bloques de terminales o condensador de potencia de orificio pasante.
Componentes y Hardware Incluido
La disponibilidad de los conectores soldados varía según el modelo:
- 18v7: Disponible con el condensador de potencia y los conectores incluidos pero no soldados, o completamente ensamblado.
- 18v15 y 24v12: Similares al 18v7, con la opción de venir ensamblados o como un kit parcial. Para aplicaciones de alta corriente, se recomienda soldar cables gruesos directamente a la placa sin conectores, ya que los bloques de terminales solo están clasificados para 15 A.
- 18v25 y 24v23: Se venden sin el condensador de potencia ni los conectores instalados. Incluyen una tira de cabecera macho de 0.1", un bloque de terminales de 5 mm de paso y un condensador de potencia. Para corrientes superiores a 15 A, se deben soldar cables gruesos directamente a la placa.
En todos los casos, el condensador de potencia es crucial para el rendimiento. Se incluye el tamaño mínimo recomendado, y se pueden añadir condensadores más grandes si el espacio lo permite o si la fuente de alimentación es deficiente o está lejos del controlador.
Software y Compatibilidad de Controladores
La configuración y el control de los Controladores de Motor Simple se realizan principalmente a través del software Pololu Simple Motor Control Center.
Instalación en Windows
Antes de conectar el controlador, es fundamental instalar los controladores y el software. Esto se hace descargando el paquete de controladores y software para Windows de Pololu. Ejecuta setup.exe y sigue las instrucciones. Es posible que debas ejecutarlo como administrador. Windows te pedirá permiso para instalar los controladores; acepta la instalación. Una vez completado, el Centro de Control de Motores Pololu Simple y una utilidad de línea de comandos (SmcCmd) estarán disponibles. Para Windows XP, puede ser necesario el Service Pack 3 para el correcto funcionamiento del puerto serial virtual.
Instalación en Linux
Para Linux, el software (SmcCenter y SmcCmd) se puede descargar como un archivo .gz. Descomprímelo con tar -xzvf y sigue las instrucciones del archivo README.txt. El puerto serial virtual del controlador funciona en Linux sin necesidad de instalación de controladores especiales, apareciendo como un dispositivo tipo /dev/ttyACM0.
Compatibilidad con Mac OS X
No se proporciona software para Mac OS X. Sin embargo, el puerto COM virtual USB del controlador es compatible con Mac OS X 10.7 (Lion) y versiones posteriores, lo que permite el control del motor. Para cambiar los parámetros de configuración, se requiere una computadora con Windows o Linux.
Primeros Pasos con el Centro de Control Pololu Simple Motor
Una vez instalado el software, la pestaña de Estado del Pololu Simple Motor Control Center es tu principal herramienta para monitorear y controlar el controlador en tiempo real. Conecta tu controlador a la PC mediante un cable USB (no incluido).
La Pestaña de Estado
Esta pestaña muestra información vital, como la Velocidad Objetivo (la velocidad deseada) y la Velocidad Actual (la velocidad real del motor). Las diferencias pueden deberse a errores, límites de aceleración/desaceleración, duración de frenado, o límites de velocidad. Las secciones afectadas se resaltan en amarillo (limitando la velocidad) o rojo (deteniendo el motor completamente). Las velocidades se muestran por defecto como porcentajes (-100% a 100%).
La sección de Límites del Motor muestra los límites actuales, que pueden ser los límites predefinidos o modificados temporalmente por comandos. La sección de Canales de Entrada detalla el estado de los canales RC o Analógicos, mostrando el Valor Bruto (raw) y el Valor Escala (scaled), junto con un resumen de su estado (Válido, Inválido por desconexión, señal inválida, etc.).
Condiciones Operativas y Control Manual
El cuadro de Condiciones proporciona información miscelánea:
- VIN: Voltaje de la fuente de alimentación, crucial para detectar subtensiones o sobretensiones.
- Temperatura: Medición de la temperatura del dispositivo para evitar daños por sobrecalentamiento. Es importante recordar que el producto puede calentarse lo suficiente como para causar quemaduras.
- Tiempo de Actividad (Up Time): Tiempo total que el controlador ha estado funcionando desde el último reinicio.
- Baud Rate: Velocidad de transmisión actual para la interfaz serial TTL.
- Período RC: Período de la señal RC en el canal de entrada RC1.
En el modo Serial/USB, el cuadro Velocidad Establecida Manualmente permite controlar la velocidad del motor mediante una barra deslizadora o ingresando un valor. Es posible que necesites presionar el botón 'Resume' para iniciar el motor si el 'Arranque Seguro' está activado o si el motor se detuvo previamente.
Manejo de Errores y Diagnóstico
Los Controladores de Motor Simple están equipados con múltiples funciones de seguridad que detienen el motor ante problemas, protegiendo así tu proyecto. La pestaña de Errores del Centro de Control es fundamental para diagnosticar y resolver estos problemas.
Tipos de Errores Comunes
- Violación de Arranque Seguro (Safe start violation): Ocurre para evitar arranques inesperados del motor. Se resuelve eliminando otros errores y moviendo las entradas a su posición neutral (en modos analógico/RC) o presionando 'Resume' (en modo serial/USB).
- Canal Requerido Inválido (Required channel invalid): Se activa si un canal RC o Analógico configurado como requerido (para control de velocidad, límite o seguridad) está desconectado o fuera de rango.
- Tiempo de Espera de Comando (Command timeout): Si se controla el motor por serial/USB y no se reciben comandos válidos durante un período configurable, el motor se detiene.
- Interruptor de Límite/Seguridad (Limit/kill switch): Se activa cuando un interruptor de límite o de seguridad detiene el motor (ej., si la velocidad objetivo es positiva y el interruptor de límite de avance está activo).
- VIN Bajo/Alto (Low/High VIN): Se activa si el voltaje de la fuente de alimentación está por debajo o por encima de los umbrales configurados, protegiendo las baterías y el controlador.
- Error del Driver del Motor (Motor driver error): Indicado por el chip del driver del motor ante subtensión o sobretemperatura interna.
- Sobretemperatura (Over temperature): Cuando la lectura del sensor de temperatura del dispositivo es demasiado alta.
- Línea ERR Alta (ERR line high): Permite que múltiples controladores se detengan si uno experimenta un error, conectando sus líneas ERR.
- Errores Seriales (Serial errors): Incluyen problemas de comunicación como Frame, Noise, RX overrun, Format, y CRC, que pueden detener el motor si el modo de entrada es Serial/USB.
Puedes verificar los errores en la pestaña de Estado, usando la utilidad de línea de comandos (SmcCmd -s), observando el LED rojo del dispositivo, o mediante comandos seriales.
Feedback Visual: Los LEDs Indicadores
Los Controladores de Motor Simple cuentan con tres LEDs que proporcionan información visual sobre el estado del dispositivo:
- LED USB Verde: Indica el estado de la conexión USB. Parpadea lentamente hasta que los controladores USB se instalan correctamente, luego se enciende de forma sólida con breves destellos durante la actividad USB.
- LED de Error Rojo: Se enciende cuando hay un error que detiene el motor, vinculado directamente al pin de salida ERR.
- LED de Estado Amarillo: Ofrece información sobre el estado del dispositivo. Al encenderse, muestra un patrón de parpadeo que indica la causa del último reinicio (ej., 8 parpadeos para reinicio externo, 3 para baja potencia lógica). Después del inicio, indica la dirección del motor: parpadeo uniforme si el motor no está en movimiento, aumento gradual de brillo para avance, y disminución gradual para retroceso.
Conexiones Eléctricas: Guía Detallada
La correcta conexión de tu controlador es fundamental para su funcionamiento. Siempre ten en cuenta las precauciones de seguridad al trabajar con electrónica de alta potencia.
Conexión de Alimentación y Motor
El primer paso es conectar la fuente de alimentación y el motor. El controlador puede alimentarse por USB (para funciones lógicas sin mover el motor) o por una fuente externa conectada a los grandes pads VIN y GND. Los pads VIN y GND más pequeños son solo para baja corriente (<500 mA).
Consideraciones de Alimentación: Es vital que el voltaje de tu fuente no exceda el voltaje máximo absoluto de tu controlador. Para baterías de 24V, se recomienda encarecidamente usar las versiones 24v12 o 24v23, ya que las versiones 18vX pueden dañarse. Asegúrate de que la fuente pueda entregar la corriente requerida por el motor y coloca un condensador grande entre la alimentación y la tierra cerca del controlador para limitar el ruido eléctrico. La función de apagado por subtensión configurable protege las baterías sensibles.
Consideraciones del Motor: Conecta tu motor DC a los pines OUTA y OUTB. Considera la corriente de calado del motor, que puede ser significativamente mayor que la corriente de funcionamiento libre, especialmente bajo carga o al cambiar rápidamente de dirección. Para mitigar el ruido eléctrico del motor, se recomienda soldar un condensador cerámico de 0.1 µF a través de los terminales del motor (o tres condensadores), usar cables de motor y alimentación gruesos y cortos, y alejar los cables del motor de las conexiones lógicas.
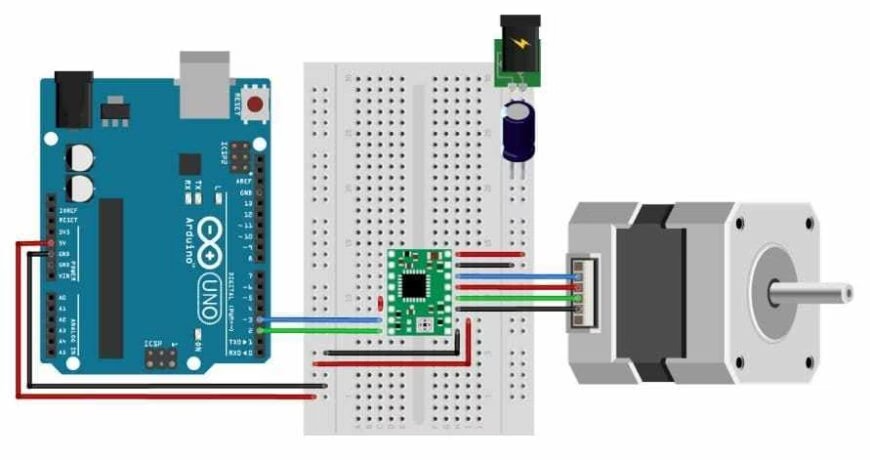
Conexión a un Dispositivo Serial
Los pines seriales permiten la comunicación con microcontroladores (Arduino, Basic Stamp, etc.) o dispositivos seriales TTL de nivel lógico. El controlador utiliza lógica de 3.3V, pero sus entradas digitales (excepto A1 y A2) son tolerantes a 5V. La comunicación serial es asíncrona, de nivel lógico (TTL), no invertida, con caracteres de 8 bits y un bit de parada (8-N-1). Es crucial conectar las tierras y asegurar la alimentación adecuada. Advertencia: No conectes dispositivos RS-232 directamente; esto puede dañar permanentemente el controlador.
Los pines clave son RX (recepción), TX (transmisión), RST (reinicio activo-bajo), ERR (salida de error/entrada para interconexión de errores) y TXIN (entrada para encadenar transmisiones de múltiples controladores).
Conexión a un Receptor RC
El controlador se puede conectar directamente a un receptor RC para control manual inalámbrico o como interruptor de límite/seguridad. Puede derivar la velocidad del motor de un solo canal RC o mezclar las señales de dos canales para control de un robot de tracción diferencial (ej., aceleración + dirección). Un jumper BEC permite alimentar el receptor RC con 3.3V o 5V, eliminando la necesidad de una batería separada. Importante: Si el receptor RC se alimenta por separado, el jumper BEC debe dejarse desconectado.
Conexión a un Potenciómetro o Joystick Analógico
Permite el control manual simple con una fuente de voltaje analógico de 0 a 3.3V. Los pines de alimentación del potenciómetro permiten al controlador detectar desconexiones. Advertencia: Las entradas analógicas no toleran 5V; no conectes voltajes superiores a 3.3V. Al igual que con RC, se puede usar un solo canal o mezclar dos para control diferencial. Los canales analógicos también pueden configurarse como interruptores de límite o de seguridad, siendo recomendables los interruptores normalmente cerrados (NC) para mayor seguridad.
Configuración Avanzada del Controlador
El Pololu Simple Motor Control Center ofrece pestañas de configuración detalladas para afinar el comportamiento de tu controlador.
Pestaña de Configuración de Entrada (Input Settings)
Aquí se define cómo el controlador calculará la Velocidad Objetivo del motor y se configuran los interruptores de límite/seguridad. El Asistente de Configuración Rápida de Entrada es el punto de partida recomendado para calibrar tus entradas. Las opciones clave incluyen:
- Modo de Entrada (Input Mode): Serial/USB (predeterminado), Analógico, o RC. Los canales analógicos y RC siempre se miden, incluso si no controlan la velocidad.
- Modo de Mezcla (Mixing Mode): Para modos Analógico o RC, permite:
- Ninguno: La velocidad se basa solo en el canal 1.
- Izquierda (+): La velocidad es la suma de los valores escalados de ambos canales (CH1+CH2).
- Derecha (-): La velocidad es la diferencia de los valores escalados de ambos canales (CH1-CH2).
- Uso Alternativo (Alternate Use): Configura canales no utilizados para control de velocidad como:
- Interruptor de Límite de Avance/Retroceso: Detiene el motor si el valor escalado supera el 50% en la dirección correspondiente.
- Interruptor de Seguridad (Kill Switch): Detiene el motor completamente si se activa.
- Parámetros de Escala: Definen cómo el Valor Bruto de una entrada se convierte en el Valor Escala. Incluyen Error min./max. (rango válido), Mínimo/Máximo (rango de control total), y Neutral mínimo/máximo (rango de velocidad cero). También se puede ajustar el Grado de Escala para control no lineal.
Esto es especialmente útil para robots de tracción diferencial, donde un controlador en modo 'Izquierda' y otro en modo 'Derecha' pueden ser controlados por un solo joystick/RC para movimiento y dirección.
Pestaña de Configuración del Motor (Motor Settings)
Esta pestaña permite establecer límites de hardware para proteger tu sistema y definir el comportamiento del motor:
- Límites Duros (Hard Limits): Almacenados en memoria no volátil, se obedecen siempre. Pueden modificarse temporalmente por comandos seriales/USB para mayor seguridad.
- Velocidad Máxima (Max speed): Velocidad máxima a la que el motor puede operar (0-3200, 100%).
- Velocidad de Arranque (Starting speed): Velocidad mínima para que el motor empiece a girar, útil para ahorrar energía y mejorar la respuesta del control.
- Aceleración/Desaceleración Máxima (Max. acceleration/deceleration): Limita la tasa de cambio de velocidad, reduciendo el estrés mecánico y los picos de corriente.
- Duración del Freno (Brake duration): Tiempo que el controlador frenará el motor antes de permitir un cambio de dirección.
- Período de Actualización de Velocidad (Speed update period): Intervalo entre actualizaciones de la Velocidad Actual, afectando la suavidad de la aceleración/desaceleración.
- Invertir Dirección del Motor (Invert motor direction): Cambia el significado de avance y retroceso.
- Frecuencia PWM (PWM frequency): Frecuencia de la señal de control del motor (1.12-21.77 kHz). Una frecuencia más alta (como 21.77 kHz, la predeterminada) elimina el molesto zumbido audible.
- Cantidad de Freno a Velocidad Cero (Speed zero brake amount): Fuerza de frenado aplicada cuando la Velocidad Actual es cero (0-32, 32 es freno completo).
Pestaña de Configuración Avanzada (Advanced Settings)
Permite ajustes finos del comportamiento del controlador:
- Detección VIN: Configura los umbrales de voltaje para los errores de VIN Bajo/Alto, protegiendo tanto el controlador como la batería. El 'offset del multiplicador VIN' es un factor de calibración.
Preguntas Frecuentes (FAQs)
Aquí respondemos algunas de las preguntas más comunes sobre los Controladores de Motor Pololu Simple.
¿Qué es un Controlador de Motor Pololu Simple?
Es un dispositivo electrónico versátil diseñado para controlar la velocidad y dirección de motores DC con escobillas. Permite la comunicación a través de múltiples interfaces como USB, serial TTL, pulsos RC y voltajes analógicos, facilitando su integración en una amplia variedad de proyectos de robótica y automatización.
¿Cuáles son las principales interfaces de control que soporta?
Los Controladores de Motor Pololu Simple soportan cuatro interfaces principales: USB para conexión directa a PC, serial TTL para microcontroladores, pulsos RC para control de radiofrecuencia (como un ESC), y voltaje analógico para joysticks o potenciómetros.
¿Puedo usar una batería de 24V con todos los modelos?
No. Aunque algunos modelos (18v7, 18v15, 18v25) tienen un voltaje máximo absoluto de 30V, no se recomienda usarlos con baterías de 24V, ya que estas pueden exceder significativamente los 24V cuando están completamente cargadas, acercándose peligrosamente a los límites del controlador. Para aplicaciones de 24V, se recomienda encarecidamente utilizar las versiones 24v12 o 24v23, que están diseñadas para manejar hasta 40V.
¿Cómo instalo los controladores en Windows?
Debes descargar el paquete de controladores y software de Pololu. Ejecuta el archivo setup.exe y sigue las instrucciones del asistente. Es posible que debas ejecutarlo como administrador y aceptar la instalación de los controladores cuando Windows lo solicite. Para Windows XP, asegúrate de tener instalado el Service Pack 3.
¿Qué información me proporciona la pestaña de estado del Centro de Control?
La pestaña de Estado te ofrece monitoreo en tiempo real del controlador. Muestra la Velocidad Objetivo y la Velocidad Actual del motor, los Límites del Motor aplicados, el estado y los valores de los Canales de Entrada (RC y Analógicos), y Condiciones operativas como el voltaje de entrada (VIN), la temperatura del dispositivo, el tiempo de actividad y la tasa de baudios serial. También te alerta sobre cualquier error que esté deteniendo el motor.
¿Qué significan los LEDs del controlador?
El controlador tiene tres LEDs: un LED USB verde que indica el estado de la conexión USB y la actividad; un LED de Error rojo que se enciende cuando hay un problema deteniendo el motor; y un LED de Estado amarillo que, al inicio, indica la causa del último reinicio y, durante la operación, muestra si el motor está parado, avanzando o retrocediendo.
¿Cómo puedo mitigar el ruido eléctrico del motor?
Para reducir el ruido eléctrico generado por el motor, se recomienda soldar un condensador cerámico de 0.1 µF a través de los terminales del motor (o tres condensadores: uno entre terminales y uno de cada terminal a la carcasa). Además, utiliza cables de motor y alimentación lo más gruesos y cortos posible, retuércelos entre sí y aleja estos cables de las conexiones lógicas. Añadir condensadores de desacoplo cerca de otros componentes electrónicos también puede ayudar.
¿Qué es el modo de mezcla (Mixing Mode) y para qué sirve?
El modo de mezcla es una característica que permite combinar las señales de dos canales de entrada (RC o analógicos) para generar la velocidad del motor. Es especialmente útil para controlar robots de tracción diferencial con un solo joystick o transmisor RC, donde un canal controla la aceleración y el otro la dirección, simplificando el control de dos motores para un movimiento coordinado.
¿Qué son los interruptores de límite o de seguridad (Kill Switches)?
Son entradas configurables (RC o analógicas) que, al activarse, detienen el motor para proteger el sistema. Un interruptor de límite puede prevenir que un actuador se mueva fuera de su rango permitido, mientras que un interruptor de seguridad (kill switch) puede inmovilizar un robot de forma remota en caso de emergencia. Se pueden configurar para detener el motor en una dirección específica o completamente.
¿Qué es la función de 'Arranque Seguro' (Safe Start) y cómo la gestiono?
El 'Arranque Seguro' es una característica de seguridad que ayuda a prevenir que el motor se ponga en marcha de forma inesperada. Está habilitada por defecto. En modo serial/USB, se activa si hay cualquier otro error deteniendo el motor y se desactiva al presionar 'Resume'. En modos analógico/RC, se activa si hay un error y las entradas no están en posición neutral, requiriendo que las entradas vuelvan a neutral para desactivarse. Puede deshabilitarse en la pestaña de Configuración Avanzada, aunque no es recomendado para la mayoría de las aplicaciones.
Si quieres conocer otros artículos parecidos a Controladores de Motor Pololu Simple: Guía Completa puedes visitar la categoría Librerías.