12/04/2022
Al adentrarnos en el universo de la programación de microcontroladores, es común encontrar términos que, a primera vista, pueden generar confusión. Uno de ellos, la curiosa expresión 'librera de retardo', nos invita a explorar un concepto fundamental en el diseño de sistemas embebidos. Lejos de referirse a un mueble para libros que se toma su tiempo, esta frase apunta, muy probablemente, a las rutinas de retardo o funciones de temporización, elementos cruciales para controlar el tiempo en nuestros dispositivos electrónicos. Acompáñanos en este recorrido para desvelar no solo este misterio, sino también para comprender el flujo de trabajo en MPLAB, el entorno de desarrollo integrado por excelencia para los microcontroladores PIC de Microchip.
La programación de microcontroladores es un campo apasionante que permite a los ingenieros y aficionados controlar el hardware a un nivel muy bajo, creando sistemas inteligentes y eficientes. Desde la lectura de sensores hasta el control de motores, casi cualquier aplicación requiere una gestión precisa del tiempo, y es aquí donde las rutinas de retardo juegan un papel protagónico. Además, entender cómo se organiza y procesa el código dentro del entorno de desarrollo MPLAB es esencial para cualquier proyecto.
- Desvelando el Misterio: ¿Qué es una "Librera de Retardo" en Microcontroladores?
- La Arquitectura del Código: ¿Dónde Reside tu Programa en MPLAB?
- Paso a Paso: Creando tu Primer Programa con MPLAB IDE
- Tablas Comparativas: Rutinas de Retardo por Software vs. Hardware
- Preguntas Frecuentes sobre MPLAB y Programación de Microcontroladores
- Conclusión
Desvelando el Misterio: ¿Qué es una "Librera de Retardo" en Microcontroladores?
Como mencionamos, el término 'librera de retardo' no es una nomenclatura estándar en el ámbito de la electrónica o la programación. Es muy probable que sea una mala traducción o una interpretación libre de lo que en realidad son las rutinas de retardo o funciones de temporización. Estas son secciones de código diseñadas específicamente para introducir una pausa o un retraso controlado en la ejecución de un programa.
¿Por qué son necesarias estas pausas? Los microcontroladores operan a velocidades extremadamente altas, midiendo el tiempo en microsegundos o incluso nanosegundos. Sin embargo, muchos componentes externos con los que interactúan (LEDs, pantallas LCD, sensores, botones) necesitan tiempos de respuesta o estabilización mucho más lentos. Por ejemplo:
- Debouncing de Botones: Cuando se pulsa un botón, no se cierra el circuito de forma instantánea y limpia; en su lugar, se producen rebotes eléctricos que el microcontrolador interpretaría como múltiples pulsaciones. Una rutina de retardo permite esperar a que el contacto se estabilice.
- Control de Periféricos: Muchos dispositivos requieren un tiempo mínimo entre comandos o para que una señal se establezca antes de ser leída. Las pantallas LCD, por ejemplo, necesitan retardos específicos después de enviar ciertos comandos o datos.
- Generación de Señales Temporizadas: Para crear trenes de pulsos con frecuencias específicas o para implementar protocolos de comunicación que dependen del tiempo.
- Efectos Visuales: En aplicaciones con LEDs, los retardos se usan para crear efectos de parpadeo, secuencias de luz, o animaciones.
Las rutinas de retardo se pueden implementar de dos formas principales:
Retardos por Software (Basados en Bucles)
Estas rutinas se crean utilizando bucles (loops) de instrucciones que no realizan ninguna operación útil más allá de consumir ciclos de máquina. El código de ejemplo que se proporcionó incluye una rutina de retardo (`WaitMs` que llama a `W001`, `W002`, `W003`, `W004`, `W005`, `W006`, `W007`, `W008`). Estas funciones decrementan contadores repetidamente hasta que llegan a cero. La duración del retardo depende directamente de la cantidad de instrucciones ejecutadas dentro del bucle y de la frecuencia del reloj del microcontrolador.
Ventajas: Son fáciles de implementar y no requieren hardware adicional.
Desventajas: Son imprecisas (sensibles a la frecuencia del reloj y a interrupciones), y lo más importante, bloquean la CPU. Mientras el microcontrolador está ejecutando la rutina de retardo, no puede hacer nada más, lo que puede ser un problema en aplicaciones multitarea o sensibles al tiempo.
Retardos por Hardware (Basados en Temporizadores)
Para aplicaciones más críticas, se utilizan los temporizadores (timers) internos del microcontrolador. Estos son módulos de hardware dedicados que pueden contar pulsos de reloj de forma independiente a la ejecución del programa principal. Cuando el contador alcanza un valor predefinido, puede generar una interrupción, notificando al CPU que ha transcurrido un tiempo específico.
Ventajas: Son mucho más precisos, no bloquean la CPU (la CPU puede realizar otras tareas mientras el temporizador cuenta) y son más robustos a las interrupciones.
Desventajas: Son más complejos de configurar, ya que requieren entender el funcionamiento de los registros del temporizador.
En resumen, cuando escuchamos 'librera de retardo' en el contexto de microcontroladores, debemos pensar en las esenciales rutinas de temporización que permiten a nuestros programas interactuar correctamente con el mundo real.
La Arquitectura del Código: ¿Dónde Reside tu Programa en MPLAB?
El código que escribes en MPLAB, ya sea en lenguaje ensamblador o C, se guarda como código fuente en archivos de texto plano. Para los ejemplos proporcionados, el archivo sería `xxx.asm`. Estos archivos se almacenan en el disco duro de tu computadora, generalmente dentro de la estructura de un proyecto de MPLAB.
Un proyecto en MPLAB organiza todos los archivos necesarios para construir tu programa: archivos fuente (`.asm`, `.c`), archivos de cabecera (`.inc`, `.h`), archivos de configuración, etc. Cuando abres MPLAB IDE, utilizas su editor integrado para escribir y modificar estos archivos.
Pero, ¿qué sucede con este código fuente una vez que lo escribes? No se carga directamente en el microcontrolador. Los microcontroladores solo entienden código máquina, que son secuencias de unos y ceros. Aquí es donde entran en juego las herramientas de construcción:
- Ensamblador (MPASM): Si escribes en lenguaje ensamblador (como el ejemplo dado), el ensamblador (MPASM) toma tu archivo `.asm` y lo traduce a código máquina.
- Compilador (XC8, XC16, XC32): Si escribes en lenguaje C, el compilador (por ejemplo, XC8 para PIC de 8 bits) toma tu archivo `.c` y lo traduce a código máquina.
El resultado final de este proceso es un archivo con extensión `.hex` (formato Intel HEX). Este archivo `.hex` contiene el código máquina que el microcontrolador puede entender y ejecutar. Es este archivo `.hex` el que finalmente se 'quema' o se 'programa' en la memoria de programa (Flash) del microcontrolador.
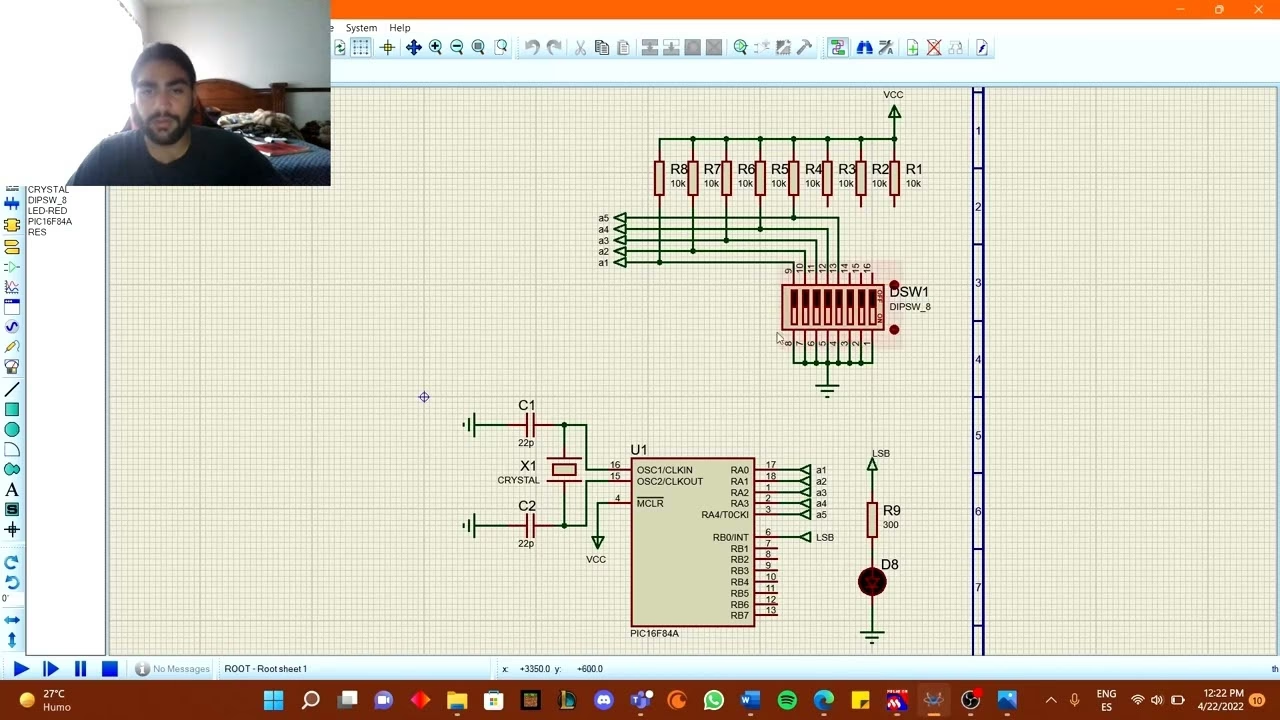
Dentro del microcontrolador, como el PIC16F84A del ejemplo, la memoria se organiza típicamente en:
- Memoria de Programa (Flash): Aquí se almacena el código ejecutable (`.hex`). La directiva `ORG 0x000` en el código ensamblador indica el punto de inicio del programa, que es la dirección de reset del microcontrolador.
- Memoria de Datos (RAM): Aquí se almacenan las variables temporales y los datos que el programa utiliza durante su ejecución. En el código proporcionado, `w_temp EQU 0x0C` o `digito EQU 0x18` son ejemplos de variables que residen en la RAM.
- Memoria EEPROM de Datos: Para almacenar datos que deben persistir incluso cuando el microcontrolador se apaga.
Los archivos de inclusión como `p16F84A.inc` son cruciales porque definen los nombres simbólicos para los registros especiales del microcontrolador (como `STATUS`, `PORTA`, `TRISA`, etc.) y los bits de configuración (`__CONFIG`), haciendo que el código sea más legible y manejable.
Paso a Paso: Creando tu Primer Programa con MPLAB IDE
Crear un programa funcional con MPLAB IDE es un proceso sistemático que involucra varias etapas, desde la escritura del código hasta la programación del chip. Los pasos que proporcionaste son una excelente guía, y aquí los detallamos:
1. Escritura del Código Fuente
El primer paso es plasmar tu lógica de programa en un lenguaje que el microcontrolador pueda entender, ya sea ensamblador o C. MPLAB IDE proporciona un editor de texto robusto con características como resaltado de sintaxis, auto-completado y numeración de líneas, lo que facilita la escritura y lectura del código. Es crucial que el código sea claro, bien comentado y siga las convenciones del lenguaje elegido. Un buen uso de comentarios, como los que se ven en el encabezado del ejemplo (`; Filename: xxx.asm`), es fundamental para la mantenibilidad del código.
Para iniciar, abres un nuevo archivo o proyecto en MPLAB y comienzas a escribir. Es importante guardar tu trabajo regularmente.
2. Compilación y Ensamblado
Una vez que has escrito tu código fuente, el siguiente paso es traducirlo a un formato que el microcontrolador pueda ejecutar directamente: el código máquina. En MPLAB, esto se logra a través del proceso de compilación (para C) o ensamblado (para ensamblador).
- Ensamble (MPASM): Si tu código está en ensamblador (`.asm`), el ensamblador MPASM de Microchip es el encargado de procesar el archivo. Este proceso convierte las instrucciones mnemotécnicas (como `MOVLW`, `MOVWF`, `GOTO`) y las directivas (como `ORG`, `EQU`) en los códigos de operación binarios correspondientes.
- Compilación (XC Compilers): Si tu código está en C (`.c`), utilizas uno de los compiladores de la suite XC (XC8, XC16, XC32, dependiendo del microcontrolador). El compilador traduce el código C de alto nivel a un código ensamblador intermedio, que luego es ensamblado para generar el código máquina final.
Durante este proceso, la herramienta de construcción también verifica si hay errores de sintaxis o lógicos simples en tu código. Si los hay, MPLAB te los mostrará en la ventana de salida, indicando la línea y la naturaleza del error. El resultado exitoso de la compilación/ensamblado es la generación del archivo `.hex`, que es el archivo ejecutable listo para ser cargado en el microcontrolador, y a menudo un archivo `.cof` (Common Object File Format) que contiene información de depuración.
3. Depuración y Simulación
Una vez que el código ha sido compilado o ensamblado sin errores, el siguiente paso es verificar su funcionamiento. La depuración es un proceso crucial para identificar y corregir errores (bugs) en el programa.
MPLAB IDE ofrece potentes herramientas para esto:
- Simulador Integrado: Es una de las características más valiosas. El simulador permite ejecutar tu código en un entorno virtual dentro de la computadora, sin necesidad de hardware físico. Puedes ejecutar el código paso a paso, observar el estado de los registros, la memoria de datos y los puertos de E/S, e incluso simular eventos externos como pulsaciones de botones o cambios en los pines de entrada. Esto ahorra mucho tiempo al permitirte probar la lógica del programa antes de cargarla en el microcontrolador real.
- Depuradores en Circuito (ICD, Real ICE): Para una depuración más avanzada y realista, puedes usar herramientas de hardware como el PICkit (un programador/depurador) o el MPLAB ICD (In-Circuit Debugger) o Real ICE. Estos dispositivos se conectan a tu computadora y al microcontrolador en tu prototipo o placa de desarrollo. Permiten ejecutar el código en tiempo real en el chip, establecer puntos de interrupción, examinar variables y registros, y modificar el flujo del programa mientras se ejecuta en el hardware real. Esta es la forma más efectiva de depurar problemas relacionados con la interacción del software y el hardware.
La fase de depuración es iterativa: escribes un poco de código, lo pruebas, depuras los errores, y repites hasta que el programa funciona como se espera.
4. Programación del Microcontrolador
El último paso es transferir el código máquina (el archivo `.hex`) desde tu computadora al microcontrolador físico. Esto se realiza utilizando un programador de microcontroladores.
- Programadores: Dispositivos como el Microchip PICkit 3, PICkit 4 o el MPLAB PM3 son herramientas de hardware que se conectan a tu computadora (generalmente vía USB) y a los pines de programación del microcontrolador (ICSP - In-Circuit Serial Programming).
- Proceso de Carga: Dentro de MPLAB IDE, seleccionas el programador que estás utilizando y le indicas que cargue el archivo `.hex` en la memoria Flash del microcontrolador. El programador se encarga de aplicar los voltajes y las secuencias de datos correctas para escribir el firmware en el chip.
Una vez que el microcontrolador ha sido programado exitosamente, está listo para ejecutar tu programa de forma autónoma. Desconectas el programador, conectas la alimentación a tu circuito, y tu microcontrolador comenzará a realizar las tareas para las que fue programado.
Este ciclo de desarrollo – escribir, compilar/ensamblar, depurar y programar – es el corazón de la creación de sistemas embebidos con MPLAB y microcontroladores PIC. Dominar cada una de estas etapas es fundamental para el éxito en el desarrollo de proyectos electrónicos.
Tablas Comparativas: Rutinas de Retardo por Software vs. Hardware
Para entender mejor la elección entre retardos por software y por hardware, veamos una tabla comparativa:
| Característica | Retardo por Software (Bucles) | Retardo por Hardware (Temporizador) |
|---|---|---|
| Precisión | Baja a Media (depende del reloj, interrupciones) | Alta (independiente del ciclo de CPU) |
| Uso de CPU | Bloquea completamente la CPU durante el retardo | Libera la CPU para otras tareas (basado en interrupciones) |
| Complejidad de Implementación | Sencilla (bucles simples) | Más compleja (configuración de registros de temporizador, interrupciones) |
| Flexibilidad | Limitada (difícil de cambiar dinámicamente) | Alta (retardos variables, eventos periódicos) |
| Consumo de Energía | Puede ser mayor si la CPU está activa en un bucle ocioso | Menor si la CPU entra en modo de bajo consumo mientras el temporizador cuenta |
| Aplicaciones Típicas | Debouncing básico, pausas cortas no críticas | Comunicación serial, PWM, sistemas operativos en tiempo real |
Preguntas Frecuentes sobre MPLAB y Programación de Microcontroladores
¿Qué microcontroladores soporta MPLAB?
MPLAB IDE está diseñado principalmente para la familia de microcontroladores de Microchip Technology, que incluye los populares PIC (de 8, 16 y 32 bits) y los controladores de señal digital (dsPIC). Es la herramienta oficial y más completa para estos dispositivos.
¿Es difícil aprender lenguaje ensamblador?
El lenguaje ensamblador es más complejo y tedioso de aprender que lenguajes de alto nivel como C, ya que requiere un conocimiento profundo de la arquitectura interna del microcontrolador y sus registros. Sin embargo, ofrece un control muy fino sobre el hardware y puede ser esencial para optimizaciones críticas de tiempo o tamaño de código en ciertas aplicaciones.
¿Qué es un archivo .hex?
Un archivo .hex (en formato Intel HEX) es un archivo de texto que contiene el código máquina binario de tu programa, junto con información de dirección, en un formato legible. Es el formato estándar utilizado por los programadores para cargar el firmware en la memoria Flash de los microcontroladores.
¿Puedo usar C en MPLAB?
Sí, absolutamente. Aunque el ejemplo proporcionado es en ensamblador, la mayoría de los desarrollos modernos para microcontroladores se realizan en lenguaje C debido a su mayor productividad, portabilidad y legibilidad. MPLAB IDE se integra perfectamente con los compiladores XC (XC8, XC16, XC32) de Microchip para la programación en C.
¿Qué es el ORG 0x000 en el código ensamblador?
ORG 0x000 es una directiva del ensamblador que indica que el código que le sigue debe ser colocado en la dirección de memoria 0x000. En los microcontroladores PIC, la dirección 0x000 es la dirección del vector de reset. Cuando el microcontrolador se enciende o se reinicia, la ejecución del programa siempre comienza en esta dirección. Por lo tanto, es común que esta dirección contenga una instrucción GOTO que salta al inicio real del programa principal.
¿Qué son los bits de configuración (__CONFIG)?
Los bits de configuración son una serie de bits especiales en la memoria del microcontrolador que definen su comportamiento fundamental al encenderse o resetearse. Controlan aspectos como el tipo de oscilador, la habilitación del Watchdog Timer (WDT), la protección de código, el Power-up Timer (PWRTE), y otras características de hardware. La directiva __CONFIG en el código ensamblador permite incrustar estos ajustes directamente en el archivo `.hex`, asegurando que el microcontrolador se configure correctamente cada vez que se programa.
Conclusión
El camino para dominar la programación de microcontroladores con MPLAB IDE es un viaje de aprendizaje continuo. Hemos desmitificado la 'librera de retardo' para entenderla como un concepto vital de temporización, hemos explorado la organización del código y hemos delineado el proceso paso a paso para crear un programa funcional. Comprender estos fundamentos no solo te permitirá dar vida a tus ideas electrónicas, sino que también te capacitará para abordar desafíos más complejos en el vasto y emocionante mundo de los sistemas embebidos. La clave reside en la práctica constante, la experimentación y una curiosidad insaciable por cómo funcionan las cosas a un nivel fundamental.
Si quieres conocer otros artículos parecidos a Desentrañando MPLAB: Código y Retardos puedes visitar la categoría Librerías.