13/06/2025
En el vasto y fascinante campo de la electrónica y la robótica, los actuadores juegan un papel fundamental al transformar las señales eléctricas en movimiento físico. Entre ellos, los servomotores se destacan como componentes esenciales, ofreciendo un control de posición preciso y repetible que es invaluable para una multitud de aplicaciones. A diferencia de los motores de corriente continua tradicionales, donde el control se centra en la velocidad de giro, los servomotores permiten indicar directamente un ángulo deseado, y ellos se encargan de posicionarse con una exactitud sorprendente. Para simplificar esta tarea, especialmente en plataformas como Arduino, existen librerías de software que encapsulan la complejidad del control, permitiéndonos manipular estos dispositivos con unas pocas líneas de código.

Este artículo explorará en profundidad qué son los servomotores, cómo funcionan internamente, los tipos más comunes que encontrarás en tus proyectos, y cómo una librería dedicada, como la popular Servo.h, puede ser tu mejor aliada para integrarlos eficazmente en tus diseños. Desde brazos robóticos hasta sistemas de orientación de sensores, la versatilidad de los servomotores, combinada con la facilidad de uso que ofrecen estas librerías, abre un abanico ilimitado de posibilidades para creadores y entusiastas.
- ¿Qué es un Servomotor y Cómo Funciona?
- La Librería de Servomotores: Tu Aliada en el Control
- Tipos Comunes de Servomotores para Proyectos Hobbistas
- Conexión de un Servomotor a un Microcontrolador (Arduino)
- Programando Servomotores con la Librería Servo.h: Un Ejemplo Práctico
- Preguntas Frecuentes sobre Servomotores y su Control
- Conclusión
¿Qué es un Servomotor y Cómo Funciona?
Un servomotor, comúnmente conocido como servo, es un tipo de motor rotatorio o actuador lineal que permite un control preciso de la posición angular o lineal, velocidad y aceleración. Consiste en un motor de corriente continua (DC), un sistema de engranajes reductores, un potenciómetro (o sensor de posición similar) para la retroalimentación de la posición, y un circuito de control electrónico. La característica distintiva de un servo es que no gira libremente como un motor DC estándar; en su lugar, se le indica una posición específica dentro de su rango de movimiento y el servo mantiene esa posición.
El funcionamiento interno de un servomotor es una maravilla de la ingeniería compacta. El motor DC proporciona la fuerza motriz, mientras que el sistema de engranajes reduce la velocidad de giro, aumentando significativamente el par. Esto permite que el servo mueva cargas considerables con una velocidad controlada. El potenciómetro está conectado al eje de salida del servo y proporciona una lectura de la posición actual del eje al circuito de control. Este circuito, a su vez, compara la posición actual con la posición deseada (que se le indica externamente) y ajusta la corriente al motor DC para mover el eje hasta que ambas posiciones coincidan. Este proceso se conoce como control de retroalimentación o bucle cerrado, lo que garantiza la precisión.
Rango de Movimiento y Alimentación
Típicamente, la mayoría de los servomotores de hobby tienen un rango de movimiento de 0 a 180 grados. Esto se debe a topes mecánicos internos que impiden que el eje gire completamente, evitando daños al potenciómetro de retroalimentación. Sin embargo, existen servomotores de rotación continua que han sido modificados para girar 360 grados sin límites, aunque en estos casos, el control se convierte en velocidad y dirección en lugar de posición angular.
En cuanto a la alimentación, los servomotores suelen operar con tensiones entre 4.8V y 7.2V. El valor más adecuado para la mayoría de los servos de hobby es de 6V. Con tensiones inferiores, el motor tendrá menos fuerza y velocidad. Con tensiones superiores a 6.5V, algunos servos pueden empezar a oscilar excesivamente o incluso dañarse, por lo que es crucial respetar el rango de voltaje recomendado por el fabricante.
Control por Señal Pulsada (PWM)
La comunicación de la posición deseada al servomotor se realiza mediante una señal de modulación por ancho de pulso (PWM). Esta señal es una serie de pulsos con un período fijo, generalmente de 20ms (50Hz). Lo que determina el ángulo del servo es el ancho de este pulso (la duración en que la señal permanece en alto). La relación entre el ancho del pulso y el ángulo puede variar ligeramente entre modelos, pero las referencias generales son:
- Un pulso entre 500-1000 microsegundos (us) corresponde a 0º.
- Un pulso de 1500 us corresponde a 90º (el punto neutro o central).
- Un pulso entre 2000-2500 us corresponde a 180º.
Variando el ancho del pulso con precisión, podemos lograr una resolución teórica de hasta décimas de grado, siempre que la mecánica del servo sea lo suficientemente fina para responder a esos cambios mínimos. Esta simplicidad en el control, donde el propio servo se encarga de mantener la posición, es lo que los hace tan atractivos para proyectos de robótica, como brazos articulados, robots con patas o sistemas de orientación de cámaras y sensores.
La Librería de Servomotores: Tu Aliada en el Control
Controlar un servomotor "a mano" generando pulsos PWM con las duraciones exactas y los tiempos de espera precisos sería una tarea tediosa y propensa a errores. Aquí es donde una librería de servomotores se convierte en una herramienta indispensable. Una librería es un conjunto de funciones y procedimientos predefinidos que simplifican el uso de hardware específico al abstraer los detalles de bajo nivel.
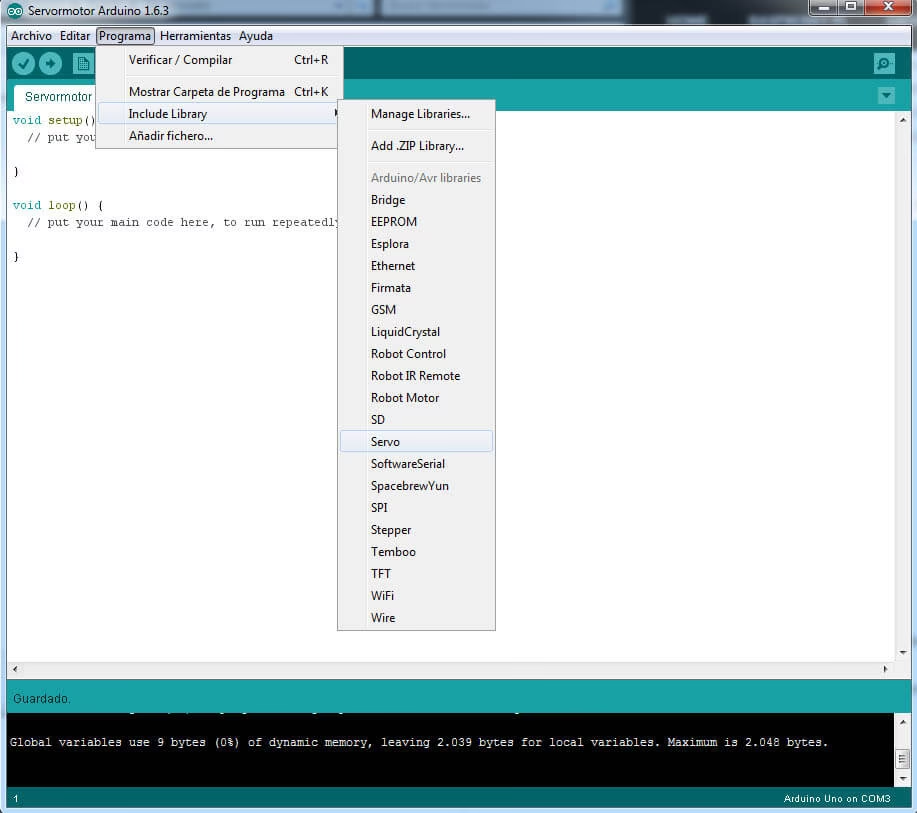
En el ecosistema de Arduino, la librería estándar Servo.h es la solución por excelencia para el control de servomotores. Esta librería te permite controlar de manera sencilla casi cualquier servomotor comercial, incluyendo los modelos más comunes como el SG90, MG90S y S3003. Para servomotores especiales, como aquellos capaces de girar 360 grados continuamente, solo se requieren pequeños ajustes en el código.
La gran ventaja de utilizar Servo.h es que no necesitas preocuparte por los cálculos de microsegundos para cada ángulo ni por la temporización de los pulsos. Simplemente le indicas el pin al que está conectado el servo y el ángulo deseado (en grados), y la librería se encarga de generar la señal PWM correcta. Además, es increíblemente eficiente, permitiendo controlar simultáneamente hasta 12 servomotores en placas Arduino Uno o Nano, y hasta 48 servomotores en una Arduino Mega, gracias a su capacidad de generar señales PWM sin bloquear el resto del código.
Tipos Comunes de Servomotores para Proyectos Hobbistas
Existe una vasta variedad de servomotores en el mercado, que difieren en tamaño, fuerza (torque), velocidad y precisión. Para proyectos caseros y educativos, nos centraremos en algunos de los modelos más populares por su excelente relación calidad/precio, fácilmente disponibles en tiendas online. Es importante notar que, aunque estos servos son económicos, sus características son modestas en comparación con los modelos industriales de alta gama. Sin embargo, para la mayoría de las aplicaciones de hobby, son más que suficientes.
Comparativa de Servomotores Populares
| Modelo | Torque (kg·cm) | Velocidad (seg/60º) | Dimensiones (mm) | Peso (g) | Engranajes | Precio Aprox. (€) |
|---|---|---|---|---|---|---|
| SG90 | 1.4 (4.8V) | 0.1 (4.8V) | 21.5 x 11.8 x 22.7 | 9 | Plástico | 1.20 - 2.00 |
| MG90S | 1.8 (4.8V) | 0.1 (4.8V) | 22.8 x 12.2 x 28.5 | 13.4 | Metal | 2.00 - 3.50 |
| MG996R | 13 (4.8V) - 15 (6V) | 0.17 (4.8V) - 0.13 (6V) | 40 x 19 x 43 | 56 | Metal | 3.50 - 6.00 |
El SG90 es el servo estándar de tamaño pequeño, ideal para proyectos ligeros donde el peso y el coste son factores críticos. Su tamaño compacto y bajo peso lo hacen perfecto para torretas pequeñas, mini-robots o aplicaciones donde la fuerza requerida es mínima. Sus engranajes de plástico son su principal limitación, ya que pueden ceder si se les exige demasiado.
El MG90S es una mejora directa del SG90, manteniendo un tamaño similar pero incorporando engranajes metálicos. Esto le confiere una mayor durabilidad y resistencia, siendo una excelente opción cuando la aplicación exige un poco más de fuerza y fiabilidad sin un aumento significativo en el tamaño o el coste. Es compatible con los accesorios del SG90.
Finalmente, el MG996R es el servo de tamaño "grande" por excelencia en el ámbito de los proyectos de robótica. Con un torque considerablemente mayor, es la elección para brazos robóticos más grandes, hexápodos o cualquier aplicación que requiera mover cargas más pesadas. Al igual que el MG90S, cuenta con engranajes metálicos, lo que le otorga una robustez superior.
La elección del servo adecuado dependerá siempre de los requisitos específicos de tu proyecto. Considera el peso que debe mover, la precisión necesaria y, por supuesto, el presupuesto. La diferencia de precio entre estos modelos y los servos industriales de alta precisión es abismal, lo que hace que los modelos de hobby sean la opción viable para la mayoría de los constructores.
Conexión de un Servomotor a un Microcontrolador (Arduino)
Conectar un servomotor a una placa de desarrollo como Arduino es un proceso bastante sencillo. Todos los servomotores de hobby vienen con tres cables, cada uno con una función específica:
- GND (Tierra): Cable de alimentación negativo. Su color suele ser marrón o negro.
- Vcc (Alimentación): Cable de alimentación positivo. Su color es siempre rojo.
- Sig (Señal): Cable por donde se envía la señal de control PWM. Su color suele ser naranja o blanco.
Para la conexión, el cable GND del servo se conecta al pin GND de Arduino (y a la tierra de tu fuente de alimentación externa, si la usas). El cable Vcc se conecta a una fuente de alimentación de 5V-6.5V. Es importante destacar que, aunque Arduino puede proporcionar 5V, su capacidad de corriente es limitada. Para servos pequeños como el SG90, Arduino puede ser suficiente para pruebas básicas. Sin embargo, para servos más grandes como el MG996R, o si vas a usar múltiples servos, es imprescindible utilizar una fuente de alimentación externa. Un error común es intentar alimentar servos potentes directamente desde Arduino, lo que puede provocar reinicios de la placa o incluso daños debido a la sobrecarga.
Finalmente, el cable de señal (Sig) se conecta a cualquier pin digital de Arduino. La librería Servo.h es flexible y puede usar la mayoría de los pines digitales, aunque es recomendable consultar la documentación para pines con capacidades PWM específicas si es crucial para tu aplicación, o si usas muchos servos.
Un punto crítico de seguridad al usar una fuente de alimentación externa es asegurarse de que todas las conexiones de tierra (GND) estén en común. Es decir, el GND de Arduino, el GND del servo y el GND de la fuente de alimentación externa deben estar conectados entre sí. No hacerlo puede crear diferencias de potencial y dañar tus componentes.
Programando Servomotores con la Librería Servo.h: Un Ejemplo Práctico
La simplicidad de la librería Servo.h es una de sus mayores virtudes. A continuación, veremos un ejemplo clásico, el sketch "Sweep", que hace que el servomotor realice un barrido continuo de 0 a 180 grados y viceversa. Este código es un excelente punto de partida para entender cómo funciona la librería.
#include <Servo.h> // Incluye la librería Servo
Servo myservo; // Crea un objeto Servo para controlar el servo
int pos = 0; // Variable para almacenar la posición del servo
void setup() {
myservo.attach(9); // Vincula el objeto 'myservo' al pin digital 9 de Arduino
}
void loop() {
// Mueve el servo de 0 a 180 grados
for (pos = 0; pos <= 180; pos += 1) { // Va de 0 a 180 grados, de 1 en 1
myservo.write(pos); // Le dice al servo que vaya a la posición 'pos'
delay(15); // Espera 15ms para que el servo se mueva
}
// Mueve el servo de 180 a 0 grados
for (pos = 180; pos >= 0; pos -= 1) { // Va de 180 a 0 grados, de 1 en 1
myservo.write(pos); // Le dice al servo que vaya a la posición 'pos'
delay(15); // Espera 15ms para que el servo se mueva
}
}Este código es bastante autoexplicativo. Primero, se incluye la librería Servo.h. Luego, se crea una instancia del objeto Servo, en este caso llamada myservo. En la función setup(), se utiliza myservo.attach(9) para indicar que nuestro servomotor está conectado al pin digital 9 de Arduino. A partir de ese momento, el objeto myservo puede controlar el servo conectado a ese pin. La función loop() contiene dos bucles for. El primero incrementa la variable pos de 0 a 180, y en cada paso, myservo.write(pos) envía la nueva posición al servo. Un pequeño delay(15) es crucial para dar tiempo al servo a moverse suavemente a la nueva posición. El segundo bucle hace lo contrario, moviendo el servo de 180 a 0 grados. Este patrón se repite indefinidamente, creando un movimiento de barrido continuo.
Preguntas Frecuentes sobre Servomotores y su Control
¿Qué diferencia hay entre un servomotor estándar y uno de rotación continua (360°)?
Un servomotor estándar (0-180°) controla un ángulo específico y se detiene en él. Tiene topes internos. Un servomotor de rotación continua, por otro lado, no controla un ángulo, sino la velocidad y dirección de giro. Se usa para aplicaciones donde se necesita un giro constante, como ruedas de un robot. La librería Servo.h puede controlarlos, pero el método write() en lugar de tomar un ángulo, tomará un valor que representa la velocidad y dirección (ej. 0=máxima velocidad en una dirección, 90=parado, 180=máxima velocidad en la otra).
¿Puedo controlar varios servomotores con un solo Arduino?
Sí, la librería Servo.h está diseñada para eso. Un Arduino Uno o Nano puede controlar hasta 12 servomotores simultáneamente, mientras que un Arduino Mega puede controlar hasta 48. Recuerda que, para múltiples servos o servos grandes, necesitarás una fuente de alimentación externa robusta.
¿Por qué mi servomotor tiembla o no se mueve correctamente?
Hay varias razones. La más común es una alimentación insuficiente. Los servos pueden consumir picos de corriente significativos al moverse, y si tu fuente (especialmente si es Arduino) no puede proporcionarla, el servo temblará o no se moverá. Asegúrate de usar una fuente externa adecuada y de que todos los pines GND estén conectados. Otra razón puede ser una mala calibración o interferencias en la señal, aunque menos común con la librería Servo.h.
¿Es necesario usar resistencias con los servomotores?
No, los servomotores se conectan directamente a los pines de alimentación y señal de tu microcontrolador o fuente de alimentación. No necesitan resistencias adicionales para limitar la corriente, ya que tienen su propia electrónica de control interna.
¿Cuál es la vida útil de un servomotor?
La vida útil de un servomotor varía enormemente según su calidad de construcción, el material de sus engranajes (plástico vs. metal) y la carga a la que se somete. Los servos económicos con engranajes de plástico pueden tener una vida útil más corta bajo uso intensivo o cargas elevadas, mientras que los servos con engranajes metálicos y rodamientos de bolas están diseñados para durar mucho más. Un uso adecuado (no exceder el torque máximo, no forzar los topes) prolongará significativamente su vida.
Conclusión
Los servomotores son sin duda uno de los componentes más versátiles y útiles en el mundo de la electrónica y la robótica. Su capacidad para posicionarse con precisión en un ángulo específico los hace indispensables para una amplia gama de aplicaciones, desde los movimientos delicados de un brazo robótico hasta la orientación de sensores. La existencia de librerías como Servo.h en Arduino ha democratizado su uso, permitiendo a entusiastas y profesionales por igual integrar esta funcionalidad compleja con una facilidad asombrosa.
Comprender cómo funcionan, conocer los tipos disponibles y dominar su conexión y programación son pasos fundamentales para cualquier proyecto que requiera movimiento controlado. Con la información y los ejemplos proporcionados, estás listo para dar tus primeros pasos y hacer que tus creaciones cobren vida con movimientos precisos y repetibles. La clave para el éxito reside en una correcta alimentación y el uso inteligente de las herramientas de software disponibles. ¡Anímate a experimentar y descubre el potencial ilimitado que los servomotores pueden ofrecer a tus ideas!
Si quieres conocer otros artículos parecidos a Servomotores y Librerías: Control Preciso en Robótica puedes visitar la categoría Librerías.