02/07/2022
El mundo de la robótica y la automatización se abre de par en par cuando aprendemos a controlar el movimiento. Y en este ámbito, los servomotores son componentes fundamentales. Gracias a su capacidad para posicionarse en ángulos precisos o girar a velocidades controladas, son ideales para brazos robóticos, sistemas de dirección y muchos otros proyectos. Pero, ¿cómo interactúa una placa Arduino con estos motores? La respuesta está en la Librería Servo de Arduino, una herramienta poderosa que simplifica enormemente esta tarea. Sin embargo, surge una pregunta común entre los entusiastas: ¿cuántos servos puede controlar realmente una placa Arduino usando esta librería? La respuesta no es tan simple como un número fijo, sino que depende de varios factores cruciales que exploraremos en profundidad.
Esta librería es una parte esencial del ecosistema Arduino, diseñada para facilitar la comunicación entre tu placa y los servomotores de radio control (RC) más comunes. Un servomotor RC típico consta de un motor de corriente continua, un conjunto de engranajes, un potenciómetro para la retroalimentación de posición y un circuito de control. La magia de la librería Servo reside en que abstrae la complejidad de generar las señales de modulación de ancho de pulso (PWM) necesarias para indicar al servo su posición deseada, permitiéndote concentrarte en la lógica de tu proyecto.
- ¿Qué es la Librería Servo de Arduino y por qué es tan útil?
- La Gran Pregunta: ¿Cuántos Servos Puede Controlar una Placa Arduino?
- Compatibilidad y Capacidad: Un Vistazo a las Placas Arduino Populares
- Más Allá de los Pines: Consideraciones Prácticas para Múltiples Servos
- Consejos para Optimizar el Control de Servos
- Preguntas Frecuentes sobre la Librería Servo y Arduino
- ¿Es necesario instalar la librería Servo en el IDE de Arduino?
- ¿Puedo controlar un servo sin la librería Servo?
- ¿Qué tipo de servo motor puedo usar con Arduino?
- ¿Cómo sé cuánta corriente consume mi servo?
- ¿Qué es el "jitter" en los servos y cómo lo evito?
- ¿Puedo usar los pines analógicos de Arduino para controlar servos?
- Conclusión
¿Qué es la Librería Servo de Arduino y por qué es tan útil?
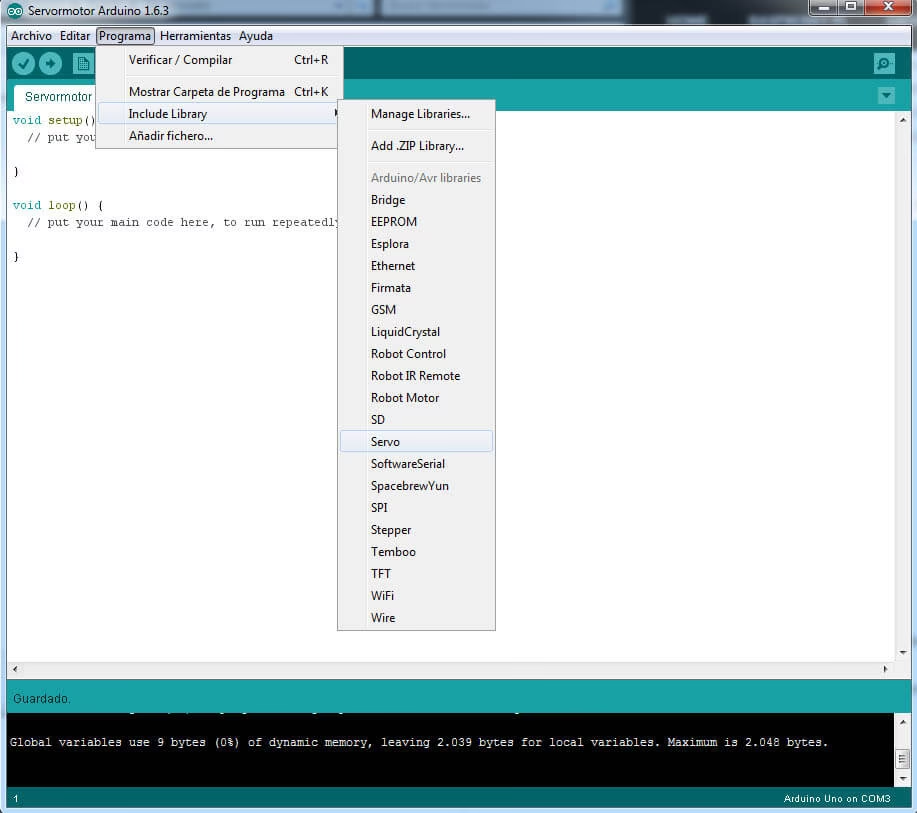
La Librería Servo de Arduino es un conjunto de funciones predefinidas que te permiten interactuar con servomotores de manera sencilla. Su principal ventaja es que viene incluida por defecto en el entorno de desarrollo integrado (IDE) de Arduino, lo que significa que no necesitas descargar ni instalar nada adicional para empezar a usarla. Simplemente abres tu IDE, escribes unas pocas líneas de código y ¡listo! Puedes hacer que un servo se mueva a una posición específica.
Existen dos tipos principales de servomotores RC que esta librería puede controlar:
- Servos de posición estándar: Estos servos están diseñados para girar a un ángulo específico, generalmente entre 0 y 180 grados. Son perfectos para aplicaciones donde necesitas un control preciso de la posición, como en la dirección de un coche RC o el movimiento de una articulación en un robot.
- Servos de rotación continua: A diferencia de los anteriores, estos servos no tienen un límite de ángulo, sino que giran continuamente. El valor que les envías con la librería determina la velocidad y la dirección de su rotación. Son ideales para sistemas de accionamiento donde necesitas un movimiento constante, como las ruedas de un robot móvil.
La librería se encarga de generar la señal PWM adecuada, que es un pulso eléctrico que se repite cada 20 milisegundos (ms). La duración de este pulso (el ancho del pulso) es lo que determina la posición o la velocidad del servo. Por ejemplo, un pulso de 1 ms puede significar 0 grados, y un pulso de 2 ms puede significar 180 grados, aunque estos valores pueden variar ligeramente entre diferentes modelos de servos.
La Gran Pregunta: ¿Cuántos Servos Puede Controlar una Placa Arduino?
Aquí es donde a menudo surge la confusión. La librería Servo en sí misma no tiene un límite inherente en el número de servos que puede manejar. El verdadero factor limitante es la capacidad de la placa Arduino para generar las señales PWM necesarias y, más importante aún, para proporcionar la corriente eléctrica suficiente a los servos. La clave reside en los pines PWM disponibles en tu placa.
Cada servo requiere su propia señal PWM dedicada. La librería Servo utiliza temporizadores (timers) internos de la placa Arduino para generar estas señales de alta precisión. Los microcontroladores de Arduino tienen un número limitado de estos temporizadores, y cada uno puede manejar un cierto número de pines PWM. Por ejemplo, el ATmega328P (usado en Arduino Uno y Nano) tiene tres temporizadores, y el ATmega2560 (usado en Arduino Mega) tiene muchos más.
Entendiendo los Pines PWM en Arduino
La Modulación por Ancho de Pulso (PWM) es una técnica para obtener un efecto analógico a partir de una señal digital. En el contexto de los servos, permite controlar la posición o velocidad del motor variando el ancho de un pulso constante. No todos los pines digitales de una placa Arduino son capaces de generar señales PWM. Los pines PWM suelen estar marcados con un símbolo de ~ (tilde) junto a su número en la placa.
Cuando la librería Servo se adjunta a un pin, asume el control del temporizador asociado a ese pin. Si intentas adjuntar demasiados servos a pines que comparten el mismo temporizador, la librería puede tener dificultades para manejar todas las señales simultáneamente o incluso puede no funcionar correctamente. Por lo general, la librería Servo puede controlar hasta 12 servos en la mayoría de las placas Arduino basadas en ATmega (como el Uno y Nano) y hasta 48 servos en placas como el Arduino Mega, utilizando diferentes temporizadores.
Compatibilidad y Capacidad: Un Vistazo a las Placas Arduino Populares
La capacidad de controlar servos varía significativamente entre los diferentes modelos de placas Arduino debido a la cantidad de pines PWM y recursos de temporización que poseen. A continuación, te presentamos una tabla comparativa de las placas más comunes y su capacidad para controlar servos utilizando la librería:
| Placa Arduino | Microcontrolador | Pines PWM Disponibles | Servos Sugeridos por Librería Servo | Consideraciones |
|---|---|---|---|---|
| Arduino Uno | ATmega328P | 3, 5, 6, 9, 10, 11 (6 pines) | Hasta 12 | Ideal para proyectos pequeños a medianos. Los pines 9 y 10 usan un temporizador, y los pines 3, 5, 6 y 11 usan otros. |
| Arduino Nano | ATmega328P | 3, 5, 6, 9, 10, 11 (6 pines) | Hasta 12 | Similar al Uno en capacidad. Excelente para prototipos compactos. |
| Arduino Mega 2560 | ATmega2560 | 2-13, 44-46 (15 pines) | Hasta 48 | La mejor opción para proyectos con muchos servos debido a sus múltiples temporizadores y pines PWM. |
| Arduino Leonardo | ATmega32u4 | 3, 5, 6, 9, 10, 11 (6 pines) | Hasta 12 | Similar al Uno en pines PWM, pero con diferente microcontrolador y capacidades USB nativas. |
| Arduino Due | ATSAM3X8E | ~54 pines (todos los digitales pueden ser PWM) | Hasta 60 (o más) | Placa de 32 bits, muy potente. Puede manejar un número muy elevado de servos, pero requiere una alimentación externa robusta. |
Como puedes ver, mientras que el Arduino Uno y Nano son excelentes para proyectos con una docena de servos o menos, el Arduino Mega se destaca como la elección obvia para aplicaciones que requieren un gran número de movimientos coordinados, como un robot humanoide o una compleja instalación animatrónica. El Arduino Due, con su arquitectura de 32 bits, lleva esta capacidad a un nivel aún superior, aunque su uso puede ser más avanzado para principiantes.
Más Allá de los Pines: Consideraciones Prácticas para Múltiples Servos
El número de pines PWM es solo una parte de la ecuación. Cuando trabajas con múltiples servos, especialmente si son de tamaño mediano o grande, la alimentación eléctrica se convierte en un factor crítico. Los servomotores consumen corriente, y si intentas alimentar demasiados directamente desde el pin de 5V de tu Arduino, te encontrarás con problemas.
Alimentación Externa: Una Necesidad Imperiosa
Cada servo motor, incluso en reposo, consume una pequeña cantidad de corriente. Pero cuando se mueve o cuando está bajo carga, el consumo de corriente puede dispararse. La capacidad de suministro de corriente del regulador de voltaje de tu placa Arduino (típicamente entre 500 mA y 1A, dependiendo de la placa y la fuente de alimentación) es limitada. Si superas este límite, puedes experimentar:
- Reinicios inesperados: La placa Arduino no recibe suficiente energía para funcionar correctamente y se reinicia.
- Comportamiento errático de los servos: Los servos pueden "temblar" (jitter), no alcanzar su posición deseada o simplemente no responder.
- Daño a tu placa Arduino: En casos extremos, un consumo excesivo de corriente puede sobrecalentar y dañar el regulador de voltaje de tu placa.
Por lo tanto, para cualquier proyecto que involucre más de uno o dos servos pequeños, es imprescindible utilizar una fuente de alimentación externa independiente para los servos. Esta fuente debe ser capaz de suministrar suficiente corriente para todos los servos en su pico de consumo. Asegúrate de que todas las tierras (GND) estén conectadas en común (la tierra de la fuente externa, la tierra de la placa Arduino y la tierra de los servos).
Consumo de Corriente y Jitter
El consumo de corriente de un servo puede variar desde unos pocos miliamperios (mA) en reposo hasta cientos de mA (o incluso amperios para servos grandes) cuando están en movimiento o bajo carga. Antes de seleccionar una fuente de alimentación, suma el consumo máximo estimado de todos tus servos. Es mejor sobredimensionar la fuente para tener un margen de seguridad.
El "jitter" o temblor del servo es un problema común que ocurre cuando la señal PWM no es lo suficientemente estable, o cuando hay fluctuaciones de voltaje debido a un suministro de energía insuficiente. Una fuente de alimentación estable y con suficiente capacidad es la mejor defensa contra el jitter.
Consideraciones Adicionales: Escudos y Controladores de Servos
Para proyectos con un número muy elevado de servos (por ejemplo, más de los 48 que podría controlar un Mega), o para liberar recursos de procesamiento de tu Arduino, existen soluciones avanzadas como los "escudos" (shields) o controladores de servos dedicados (por ejemplo, basados en el chip PCA9685). Estos dispositivos se comunican con tu Arduino a través de I2C (un bus de comunicación serial) y se encargan de generar las señales PWM para una gran cantidad de servos (típicamente 16 servos por chip, y puedes encadenar varios chips). Esto permite que tu Arduino se concentre en la lógica principal de tu proyecto, delegando el control de los servos a un chip especializado.
Consejos para Optimizar el Control de Servos
Para asegurar un funcionamiento óptimo de tus servomotores con Arduino, considera los siguientes consejos:
- Conexión Correcta: Cada servo tiene tres cables: alimentación (generalmente rojo, 5V), tierra (generalmente negro o marrón, GND) y señal (generalmente amarillo, naranja o blanco). Conecta la señal al pin PWM de Arduino y la alimentación/tierra a tu fuente de alimentación externa.
- Código Eficiente: La librería Servo es eficiente, pero un uso descuidado del `delay()` puede bloquear tu programa. Si necesitas movimientos coordinados o tareas simultáneas, utiliza la función `millis()` para gestionar el tiempo de manera no bloqueante.
- Desconexión de Servos: Cuando un servo no necesita mantener una posición (por ejemplo, cuando no se mueve), puedes usar `servo.detach()` para liberar el pin y el temporizador asociado. Esto reduce el consumo de energía y puede liberar recursos del microcontrolador si los necesitas para otras tareas. Para volver a controlarlo, usa `servo.attach()`.
- Rango de Movimiento: Los servos tienen un rango de movimiento físico. Asegúrate de que los valores que envías con `servo.write()` (0-180 grados) o `servo.writeMicroseconds()` (para un control más fino del pulso) estén dentro de los límites seguros de tu servo para evitar dañarlo.
Preguntas Frecuentes sobre la Librería Servo y Arduino
¿Es necesario instalar la librería Servo en el IDE de Arduino?
No, la librería Servo viene preinstalada con el IDE de Arduino. Puedes encontrar ejemplos de su uso en el menú Archivo > Ejemplos > Servo.
¿Puedo controlar un servo sin la librería Servo?
Sí, es posible generar la señal PWM manualmente utilizando las funciones `digitalWrite()` y `delayMicroseconds()`, pero es mucho más complejo y menos preciso. La librería Servo simplifica enormemente este proceso al manejar los temporizadores del microcontrolador por ti.
¿Qué tipo de servo motor puedo usar con Arduino?
La librería Servo está diseñada para controlar servomotores RC (Radio Control) de hobby estándar, tanto de posición como de rotación continua. Son los que comúnmente ves en tiendas de electrónica y robótica.
¿Cómo sé cuánta corriente consume mi servo?
La hoja de datos (datasheet) del fabricante de tu servo debería especificar el consumo de corriente en reposo y en movimiento (o bajo carga). Si no tienes la hoja de datos, puedes medirlo con un multímetro en serie con la línea de alimentación del servo, pero ten cuidado de no sobrecargar el multímetro.
¿Qué es el "jitter" en los servos y cómo lo evito?
El "jitter" es un temblor o movimiento inestable del servo cuando debería estar quieto o moviéndose suavemente. Las causas comunes son una fuente de alimentación insuficiente o inestable, o interferencias en la señal. Asegúrate de usar una fuente de alimentación externa adecuada y de que tus conexiones sean sólidas.
¿Puedo usar los pines analógicos de Arduino para controlar servos?
Los pines analógicos de Arduino (A0-A5, etc.) pueden configurarse para funcionar como pines digitales. Sin embargo, solo algunos pines digitales tienen capacidad PWM. Por lo tanto, solo puedes usar un pin analógico para controlar un servo si ese pin también tiene capacidad PWM cuando se configura como digital.
Conclusión
La librería Servo de Arduino es una herramienta indispensable para cualquier proyecto que involucre servomotores. Si bien la librería en sí no impone un límite, la capacidad real para controlar servos está intrínsecamente ligada al número de pines PWM disponibles en tu placa Arduino y, crucialmente, a una fuente de alimentación externa adecuada para manejar el consumo de corriente de los motores. Elegir la placa correcta (como un Arduino Mega para proyectos con muchos servos) y proporcionar una alimentación estable son los pilares para un control de servos exitoso y sin problemas. Con estos conocimientos, estás listo para dar vida a tus creaciones robóticas y hacer que tus proyectos se muevan con precisión y fiabilidad.
Si quieres conocer otros artículos parecidos a Controlando Servos con Arduino: Límites y Posibilidades puedes visitar la categoría Librerías.